
Page 140 - 《武汉大学学报(信息科学版)》2025年第9期
P. 140
1868 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 9 月
图 3 本文算法技术流程
Fig. 3 Flowchart of the Proposed Algorithm
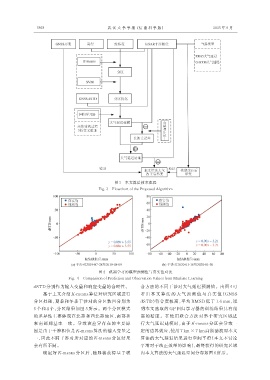
图 4 机器学习的模型预测值与真实值对比
Fig. 4 Comparison of Prediction and Observation Values from Machine Learning
dSTD 分别作为输入变量和响应变量的合理性。 合方法的不同干涉对大气延迟预测值。由图 4 可
基于上文介绍 K-means 算法对研究区域进行 看 出 本 文 算 法 的 大 气 预 测 值 与 真 实 值(GNSS
分区处理,夏季和冬季干涉对的分区数目分别为 dSTD)符合度极高,平均 RMSD 低于 1.6 mm,说
5 个和 4 个,分区结果如图 5 所示。两个分区模式 明本文选取的 GP 回归学习器的训练结果具有很
的差异性主要体现在北部和西北部地区,南部和 高的精度。在使用联合方法对整个研究区域进
东南部则基本一致。导致该差异存在的主要原 行大气延迟建模时,由于 K-means 分区会导致一
因是由于干涉相位是 K-means 算法的输入变量之 定的边界效应,使用 7 km × 7 km 高斯滤波对本文
一,因此不同干涉对所对应的 K-means 分区结果 算法的大气延迟结果进行空间平滑(本文不讨论
会有所不同。 平滑对于改正效果的影响),最终获得的研究区域
确定好 K-means 分区后,随即将获得基于联 内本文算法的大气延迟空间分布如图 6 所示。