
Page 414 - 《软件学报》2025年第12期
P. 414
李洁 等: 历史交通数据驱动的 VANET 智能路由算法 5795
图 15 显示了各种不同算法在车辆不同的传输半径 R 下网络收益率的仿真结果. 随着传输半径的增加, 平均跳
数减小, 网络中参与数据包传输的车辆减少, 而数据包成功率逐渐增加, 因此网络收益率逐渐增大. 同样地, 图 15(a)
和图 15(b) 的对比也表明, HTD-IR 在数据包不同的生存时间 (TTL) 下的网络收益率也优于其他 3 种协议.
图 16 显示了各种不同算法在数据包不同的生存时间 (TTL) 下网络收益率的仿真结果. 随着数据包生存周期
的增大, 数据包的投递率也随之升高, 使得成功的数据包数增多, 而跳数变化平缓, 因此网络收益率升高. 同样地,
图 16(a) 和图 16(b) 的对比也表明, HTD-IR 在车辆不同的传输半径 R 下的网络收益率也优于其他 3 种协议.
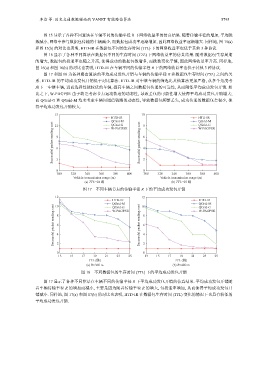
图 17 和图 18 为各种路由算法的平均成功发包开销与车辆的传输半径 R 和数据包生存时间 (TTL) 之间的关
系. HTD-IR 的平均成功发包开销低于对比算法. HTD-IR 对中继车辆的筛选比其他算法更加严格, 从多个角度考
虑下一中继车辆, 进而选择性能较优的车辆, 提高车辆之间数据包传递的可靠性, 从而降低平均成功发包开销. 相
比之下, W-PAGPSR 由于缺乏考虑节点运动轨迹的动态性, 导致丢包的可能性增大使得平均成功发包开销增大;
而 QGrid-G 和 QGrid-M 均未考虑车辆间通信链路的动态性, 导致数据包频繁丢失, 成功传递的数据包会很少, 使
得平均成功发包开销较大.
15 10
HTD-IR HTD-IR
QGrid-M 8 QGrid-M
Successful packet sending cost 9 6 Successful packet sending cost 6 4
QGrid-G
QGrid-G
12
W-PAGPSR
W-PAGPSR
0 3 2 0
300 320 340 360 380 400 300 320 340 360 380 400
Vehicle transmission range (m) Vehicle transmission range (m)
(a) TTL=20 跳 (b) TTL=25 跳
图 17 不同车辆节点的传输半径 R 下的平均成功发包开销
12 12
HTD-IR HTD-IR
QGrid-M 10 QGrid-M
Successful packet sending cost 8 6 4 Successful packet sending cost 8 6 4
10
QGrid-G
QGrid-G
W-PAGPSR
W-PAGPSR
0 2 2 0
13 15 17 19 21 23 25 13 15 17 19 21 23 25
TTL (跳) TTL (跳)
(a) R=360 m (b) R=400 m
图 18 不同数据包的生存时间 (TTL) 下的平均成功发包开销
图 17 显示了各种不同算法在车辆不同的传输半径 R 下平均成功发包开销的仿真结果. 平均成功发包开销随
着车辆传输半径 R 的增加而减小, 主要是因为随着传输半径 R 的增大, 包投递率增加, 从而使得平均成功发包开
销减小. 同样地, 图 17(a) 和图 17(b) 的对比也表明, HTD-IR 在数据包生存时间 (TTL) 变化的情况下也具有较低的
平均成功发包开销.