
Page 411 - 《软件学报》2025年第12期
P. 411
5792 软件学报 2025 年第 36 卷第 12 期
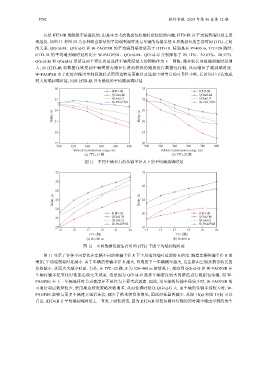
虽然 HTD-IR 的跳数不是最优的, 但是本文考虑数据包传输时延较低的问题, HTD-IR 在平均端到端时延上表
现最优. 如图 11 和图 12 为各种路由算法的平均端到端时延与车辆的传输半径 R 和数据包的生存时间 (TTL) 之间
的关系. QGrid-M、QGrid-G 和 W-PAGPSR 的平均端到端时延高于 HTD-IR. 特别是在 R=400 m, TTL=20 跳时,
HTD-IR 的平均端到端时延相比于 W-PAGPSR、QGrid-M、QGrid-G 分别降低了 20.11%、30.63%、20.97%.
QGrid-M 和 QGrid-G 虽然这两个算法总是选择车辆密度最大的网格作为下一网格, 路径较长导致端到端时延增
大, 而 HTD-IR 将数据包转发到车辆密度与路径长度均较优的路段进行数据包传输, 从而缩短了端到端时延.
W-PAGPSR 由于在处理路由空洞问题时采用周边转发策略以及选择中继节点的可靠性不够, 长时间不可达造成
较大的端到端时延, 因此 HTD-IR 具有最低的平均端到端时延.
30 35
HTD-IR HTD-IR
QGrid-M QGrid-M
QGrid-G QGrid-G
27 32
W-PAGPSR W-PAGPSR
Delay (s) 24 Delay (s) 29
26
21
18 23
15 20
300 320 340 360 380 400 300 320 340 360 380 400
Vehicle transmission range (m) Vehicle transmission range (m)
(a) TTL=15 跳 (b) TTL=20 跳
图 11 不同车辆节点的传输半径 R 下的平均端到端时延
32 32
30
28
28
Delay (s) 26 Delay (s) 24
24
HTD-IR 20 HTD-IR
QGrid-M QGrid-M
22
QGrid-G QGrid-G
W-PAGPSR W-PAGPSR
20 16
13 15 17 19 21 23 13 15 17 19 21 23
TTL (跳) TTL (跳)
(a) R=360 m (b) R=400 m
图 12 不同数据包的生存时间 (TTL) 下的平均端到端时延
图 11 显示了各种不同算法在车辆不同的传输半径 R 下平均端到端时延的仿真结果. 随着车辆传输半径 R 的
增加, 平均端到端时延减小. 由于车辆的传输半径 R 越大, 可选的下一车辆概率越大, 发生路由空洞及携带转发的
次数减小, 从而大大减少时延. 另外, 在 TTL=20 跳, R 为 320–400 m 的情况下, 观察到 QGrid-G 和 W-PAGPSR 在
车辆传输半径变化时性能出现交叉现象. 这是因为 QGrid-G 选择车辆密度较大的路径进行数据包传输, 而 W-
PAGPSR 在下一车辆选择时节点密度并不是作为主要考虑因素. 因此, 当车辆的传输半径较小时, W-PAGPSR 的
可通信邻居数量较少, 采用周边转发策略次数增多, 从而使得时延比 QGrid-G 大. 而车辆的传输半径较大时, W-
PAGPSR 能够与更多车辆建立通信连接, 减少了携带转发的情况, 因此时延显著减少. 从图 11(a) 和图 11(b) 可以
看出, HTD-IR 在平均端到端时延上一直处于最低状态, 因为 HTD-IR 沿较短路径传输的同时减少路由空洞的发生