
Page 412 - 《软件学报》2025年第12期
P. 412
李洁 等: 历史交通数据驱动的 VANET 智能路由算法 5793
使得时延最少, 能够更好地适应车辆的传输半径 R 的变化, 另外, 在数据包生存时间 (TTL) 发生变化的情况下也有
较好表现.
图 12 显示了各种不同算法在数据包不同的生存时间 (TTL) 下平均端到端时延的仿真结果. 随着数据包的生
存时间 (TTL) 的增加, 平均端到端时延也随之增加. 增加数据包的生存时间允许数据包有更多的时间到达目的地,
从而增加延迟. 另外, 在 R=360 m, TTL 为 13–23 跳情况下, 观察到 QGrid-G 和 W-PAGPSR 在 TTL 变化时性能出
现交叉现象. 这是因为 QGrid-G 选择的路径密度较高, 路径较长, 而 W-PAGPSR 在下一车辆选择时更多考虑距离
因素. 因此, 当 TTL 较小时, QGrid-G 所成功转发的数据包所选路径较长从而使得时延比 W-PAGPSR 大. 而 TTL
较大时, QGrid-G 有更多的时间到达目的地, 而 W-PAGPSR 与邻居车辆可通信的数量比 QGrid-G 少, 存在更多携
带转发的情况, 因此 QGrid-G 的时延少. 同样地, 图 12(a) 和图 12(b) 也表明, HTD-IR 在不同传输半径 R 下对平均
端到端时延有一定的改善.
图 13 和图 14 展示了各种路由算法的数据包投递率与车辆的传输半径 R 和数据包生存时间 (TTL) 之间的关
系. HTD-IR 在数据包投递率方面表现出较高水平, 特别是在 R = 340 m, TTL = 20 跳时, HTD-IR 的投递率相较于
W-PAGPSR、QGrid-M、QGrid-G 分别提高了 42.93%、51.52%、54.04%. 这表明 HTD-IR 通过选择最优的路由路
径并采用较优的 V2V 传输策略, 相较于其他算法更能有效提高数据包的投递率. 相比之下, QGrid-M 和 QGrid-G
对划分的网格区域采用马尔可夫预测策略和贪婪策略, 其中要么未考虑车辆之间链路的动态性, 要么未考虑车辆
运行轨迹的动态性可能导致数据包丢失. 而 W-PAGPSR 对节点间通信链路质量进行评估, 但由于缺乏对节点运动
轨迹动态性的考虑, 也可能导致数据包丢失. 因此, HTD-IR 在网络性能方面表现出最佳水平.
1.0 1.0
HTD-IR HTD-IR
QGrid-M QGrid-M
0.8 QGrid-G 0.8 QGrid-G
W-PAGPSR W-PAGPSR
Delivery ratio 0.6 Delivery ratio 0.6
0.4
0.4
0.2 0.2
0 0
300 320 340 360 380 400 300 320 340 360 380 400
Vehicle transmission range (m) Vehicle transmission range (m)
(a) TTL=15 跳 (b) TTL=20 跳
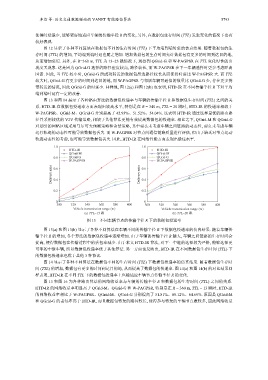
图 13 不同车辆节点的传输半径 R 下的数据包投递率
图 13(a) 和图 13(b) 显示了各种不同算法在车辆不同的传输半径 R 下数据包投递率的仿真结果. 随着车辆传
输半径 R 的增加, 各个算法的数据包投递率逐渐增加. 由于车辆的传输半径 R 越大, 车辆之间链路的生存时间会
提高, 使得数据包在传输过程中的丢包率减少. 由于本文 HTD-IR 算法, 对下一中继的选择较为严格, 能够选择更
可靠的中继车辆, 所以数据包投递率优于其他算法. 另一方面也反映出, HTD-IR 在不同数据包生存时间 (TTL) 下
的数据包投递率也优于其他 3 种协议.
图 14 显示了各种不同算法在数据包不同的生存时间 (TTL) 下数据包投递率的仿真结果. 随着数据包生存时
间 (TTL) 的增加, 数据包有更多的时间到达目的地, 从而提高了数据包的投递率. 图 14(a) 和图 14(b) 的对比结果同
样表明, HTD-IR 在不同 TTL 下的数据包投递率上也能适应车辆节点传输半径 R 的变化.
图 15 和图 16 为各种路由算法的网络收益率与车辆的传输半径 R 和数据包的生存时间 (TTL) 之间的关系.
HTD-IR 的网络收益率明显高于 QGrid-M、QGrid-G 和 W-PAGPSR, 特别是在 R = 360 m, TTL = 13 跳时, HTD-IR
的网络收益率相比于 W-PAGPSR、QGrid-M、QGrid-G 分别提高了 51.81%、88.12%、64.69%. 原因是 QGrid-M
和 QGrid-G 的丢包率高于 HTD-IR, 而且数据包转发的路径较长, 使得参与转发的车辆节点数较多, 因此网络收益