
Page 366 - 《软件学报》2025年第12期
P. 366
邱巧燕 等: 局部-全局动态图学习与互补融合的点云配准方法 5747
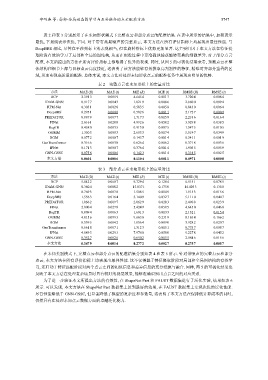
表 2 和表 3 分别展示了在未知形状模式下完整点云和部分点云的配准结果. 在表中所示的结果中, 加粗表示
最优, 下划线表示次优, 下同. 对于带有高斯噪声的完整点云, 本文方法在所有评估指标上均展现出最佳性能. 与
DeepBBS 相比, 尽管在平移指标上的表现相当, 但在旋转指标上优势更加显著. 这主要归因于本文方法在特征提
取阶段有效地学习了局部和全局的图结构, 从而在配准过程中更准确地捕获旋转变换的细微差异. 对于部分点云
配准, 本文所提出的方法在所有评价指标上都取得了优异的表现. 同时, 从图 5 的可视化结果来看, 预测点云在整
体结构和细节上都与目标点云高度接近, 这表明了该方法能够有效获取高判别性的特征, 精准对齐部分重叠的区
域, 从而实现高质量的配准. 总体来说, 本文方法对处理未知形状点云的配准任务中展现出明显的优势.
表 2 完整点云在未知形状上的定量对比
方法 MAE (R) MAE (t) MIE (R) MIE (t) RMSE (R) RMSE (t)
DCP 2.391 3 0.005 9 4.645 4 0.011 7 3.720 4 0.008 4
IDAM-GNN 0.917 7 0.004 3 1.821 9 0.008 6 2.680 0 0.009 4
RPM-Net 0.305 1 0.002 8 0.583 5 0.005 8 0.843 0 0.006 4
DeepBBS 0.295 1 0.000 6 0.582 6 0.001 1 2.172 7 0.000 9
PREDATOR 0.887 9 0.007 7 1.717 3 0.015 9 2.218 6 0.016 4
FINet 2.616 1 0.028 8 4.992 6 0.058 2 3.929 8 0.038 5
RegTR 0.458 0 0.003 5 0.913 0 0.007 5 1.547 5 0.010 5
OGMM 1.350 3 0.008 3 2.683 3 0.017 4 5.519 7 0.034 9
RGM 0.077 2 0.000 7 0.143 7 0.001 4 0.341 1 0.001 9
GeoTransformer 0.316 6 0.003 0 0.626 4 0.006 2 0.371 8 0.003 6
IFNet 0.171 3 0.000 7 0.376 4 0.001 4 1.905 5 0.005 9
GNN-GSSC 0.075 6 0.000 6 0.142 3 0.001 4 0.318 5 0.002 5
本文方法 0.060 1 0.000 6 0.110 4 0.001 1 0.097 1 0.000 8
表 3 部分点云在未知形状上的定量对比
方法 MAE (R) MAE (t) MIE (R) MIE (t) RMSE (R) RMSE (t)
DCP 5.042 2 0.060 7 9.729 4 0.120 4 6.915 1 0.078 5
IDAM-GNN 8.360 4 0.088 2 15.837 1 0.175 0 14.429 3 0.138 8
RPM-Net 0.769 3 0.007 0 1.508 5 0.014 9 1.915 3 0.015 6
DeepBBS 1.556 3 0.016 4 3.140 9 0.032 7 5.111 0 0.044 7
PREDATOR 1.066 2 0.009 7 2.062 9 0.020 3 2.490 8 0.023 9
FINet 2.800 4 0.027 8 5.424 9 0.058 5 4.645 0 0.046 8
RegTR 0.809 4 0.006 3 1.601 3 0.013 3 2.132 1 0.015 4
OGMM 4.815 6 0.099 3 9.663 0 0.231 9 8.163 4 0.166 2
RGM 0.539 5 0.004 2 1.056 4 0.009 0 3.928 2 0.020 7
GeoTransformer 0.661 8 0.007 1 1.312 3 0.015 1 0.775 7 0.008 7
IFNet 4.089 3 0.029 3 7.976 0 0.058 0 9.227 8 0.045 2
GNN-GSSC 0.352 7 0.002 6 0.650 2 0.005 5 2.884 6 0.015 6
本文方法 0.147 9 0.001 4 0.277 2 0.002 7 0.275 7 0.005 7
在未知类别模式下, 完整点云和部分点云的配准结果分别如表 4 和表 5 所示. 针对带噪声的完整点云和部分
点云, 本文方法在所有评价指标上均表现出最佳性能. 这不仅得益于特征提取阶段对局部和全局图结构的有效学
习, 还归功于特征匹配阶段对两个点云之间的相似信息和差异信息的充分挖掘与融合. 同样, 图 5 的可视化结果也
反映了本文方法在处理复杂场景时具有较好的视觉效果, 能够准确识别出点云之间的对应关系.
为了进一步验证本文所提出方法的有效性, 在 ShapeNet Part 和 FAUST 数据集进行了泛化实验, 结果如表 6
所示. 可以发现, 本文方法在 ShapeNet Part 数据集上达到最好的效果, 在 FAUST 数据集上实现次优的泛化性能.
尽管性能略低于 GNN-GSSC, 但显著降低了模型的复杂度和参数量, 这表明了本文方法在保持低计算成本的同时,
仍然具有在处理未知点云数据方面的卓越泛化能力.