
Page 365 - 《软件学报》2025年第12期
P. 365
5746 软件学报 2025 年第 36 卷第 12 期
包含 14 007 个点云数据, 而测试集则包含 2 874 个点云数据.
(3) FAUST 数据集 [42] 包含 10 个不同人体的 3D 模型, 每个受试者在 30 种不同姿势下进行扫描, 每种姿势的
点云大约由 80 000 个点组成.
针对上述数据集, 本文采用与文献 [17,33] 类似的方式, 将训练集的 80% 作为实际训练集, 剩余的 20% 作为验
证集. 对于每个点云, 随机选择 1 024 个点并打乱其顺序来生成源点云. 接着, 在 [0°, 45°] 范围内随机生成欧拉角
[−0.5,0.5] 之间生成平移变换. 随后, 将这些变换作用于源点云, 并打乱顺序以生成对应的目
旋转, 并沿着每个轴在
N(0,0.01 ) 分布产生的高斯噪声. 在此基础上, 从源
2
标点云. 为了模拟现实环境中的点云数据, 对每个点云添加由
点云和目标点云中分别去除 30% 的点, 以模拟部分遮挡的点云场景. 此外, 在未知形状的情况下, 使用所有类别的
样本进行训练和测试; 在未知类别的情况下, 仅选择前 20 个类别的样本进行训练, 并使用剩余 20 个类别的样本进
行测试.
2.2 实验设置
所有实验均在配置单个 NVIDIA RTX 2080Ti GPU 的设备上使用 PyTorch 框架实现的. 对于完整点云配准, 使
用 Adam 优化器对网络进行 50 次训练. 在训练过程中, 将初始学习率设置为 1×10 , 衰减率为 0.2, 并逐步下降至
−3
4×10 . 对于部分点云配准, 训练回合数设为 100 轮, 并在第 40 轮、60 轮以及 80 轮时进行学习率调整.
−5
表 1 提供了本文所提出模型的详细设置. 具体来说, 选择点云的坐标作为输入的点特征, 并将特征提取阶段的
′
模块堆叠层数设置为 L = 4, 匹配阶段的模块堆叠层数设置为 L = 2. 在动态偏移的局部图学习模块中, 每个点的邻
域大小为 K = 24, 所生成的特征维数为 C = 128. 在动态关注的全局图学习模块中, 高斯核超参数设置为 σ = 0.8,
所生成的特征维数为 C = 128. 因此, 特征匹配阶段的特征维度为 D = 512.
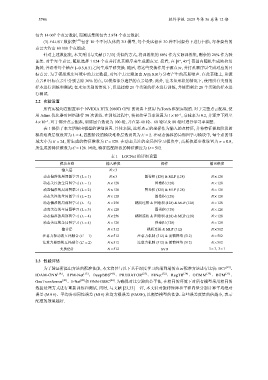
表 1 LGCNet 的详细设置
模块名称 输入维度 操作 输出维度
输入层 N ×3 - -
动态偏移的局部图学习 ( L = 1) N ×3 图卷积 (128) & MLP (128) N ×128
动态关注的全局图学习 ( L = 1) N ×128 图卷积 (128) N ×128
动态偏移的局部图学习 ( L = 2) N ×128 图卷积 (128) & MLP (128) N ×128
动态关注的全局图学习 ( L = 2) N ×128 图卷积 (128) N ×128
动态偏移的局部图学习 ( L = 3) N ×256 跳跃连接 & 图卷积 (128) & MLP (128) N ×128
动态关注的全局图学习 ( L = 3) N ×128 图卷积 (128) N ×128
动态偏移的局部图学习 ( L = 4) N ×256 跳跃连接 & 图卷积 (128) & MLP (128) N ×128
动态关注的全局图学习 ( L = 4) N ×128 图卷积 (128) N ×128
整合层 N ×512 跳跃连接 & MLP (512) N ×512
注意力驱动的互补融合 ( L = 1) N ×512 注意力机制 (512) & 前馈网络 (512) N ×512
′
′
注意力驱动的互补融合 ( L = 2) N ×512 注意力机制 (512) & 前馈网络 (512) N ×512
变换估计 N ×512 SVD 3×3, 3×1
2.3 性能评估
为了验证所提出方法的配准性能, 本文将其与以下基于深度学习的端到端的点云配准方法进行比较: DCP [23] 、
IDAM-GNN [18] 、RPM-Net [17] 、DeepBBS [43] 、PREDATOR [25] 、FINet [32] 、RegTR [34] 、OGMM [35] 、RGM [33] 、
GeoTransformer [20] 、IFNet [22] 和 GNN-GSSC [44] . 为确保对比实验的公平性, 在相同的环境下对所有模型采用相同的
数据处理方式进行重新训练和测试. 同时, 与文献 [23,33] 一样, 本文针对旋转矩阵和平移向量分别计算平均绝对
误差 (MAE)、平均各项同性误差 (MIE) 和均方根误差 (RMSE), 以衡量模型的性能. 这些误差度量的值越小, 表示
配准的效果越好.