
Page 203 - 《软件学报》2025年第5期
P. 203
程浩喆 等: 基于双向拟合掩码重建的多模态自监督点云表示学习 2103
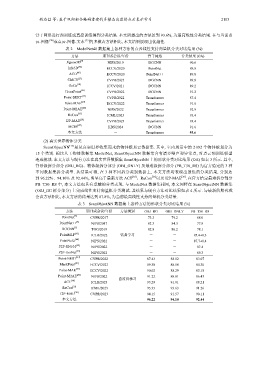
骨干网络进行预训练或直接训练得到分类结果. 本文所提出的方法达到 93.6%, 为最高线性分类结果. 在与当前点
云-图像 [28] 或点云-图像-文本 [35] 的多模态方法相比, 本文结果展现出优越性.
表 2 ModelNet40 数据集上各种方法的点云线性支持向量机分类对比结果 (%)
方法 期刊或会议/年份 骨干网络 分类结果 (OA)
[9]
Jigsaw3D NIPS/2019 DGCNN 90.6
[45]
Info3D ECCV/2020 PointNet 89.8
[46]
ACD ECCV/2020 PointNet++ 89.8
[27]
CMCV CVPR/2021 DGCNN 89.8
[10]
OcCo ICCV/2021 DGCNN 89.2
[13]
CrossPoint CVPR/2022 DGCNN 91.2
[17]
Point-BERT CVPR/2022 Transformer 87.4
[19]
Point-MAE ECCV/2022 Transformer 91.0
[20]
Point-M2AE NIPS/2022 Transformer 92.9
[35]
ReCon ICML/2023 Transformer 93.4
[28]
I2P-MAE CVPR/2023 Transformer 93.4
[47]
MCIB KBS/2024 DGCNN 91.6
本文方法 - Transformer 93.6
(2) 真实世界物体分类
ScanObjectNN [15] 是从真实世界收集而来的物体级点云数据集. 其中, 室内场景中的 2 092 个物体被划分为
15 个类别. 相比人工物体数据集 ModelNet, ScanObjectNN 数据集含有诸多噪声和异常点, 对点云预训练模型
造成挑战. 本文方法与现有方法在真实世界数据集 ScanObjectNN 上的形状分类对比结果 (OA) 如表 3 所示. 其中,
背景级拆分部分 (OBJ_BG)、物体级拆分部分 (OBJ_ONLY) 及最难级拆分部分 (PB_T50_RS) 为官方给定的 3 种
不同数据集拆分类型. 从结果可得, 在 3 种不同拆分类别数据上, 本文方法均表现出最优的分类结果, 分别达
到 96.22%、94.10% 及 92.44%, 明显高于最新方法 ACT [30] 、ReCon [35] 以及 I2P-MAE [28] . 在官方给定最难拆分部分
PB_T50_RS 中, 本文方法也具有卓越的分类表现. 与 ModelNet 数据集相同, 本文同样在 ScanObjectNN 数据集
(OBJ_BG 拆分部分) 上完成线性支持向量机分类测试. 其结果与现有方法对比结果如表 4 所示. 与最新的期刊或
会议方法相比, 本文方法的结果达到 87.8%, 为当前最高线性支持向量机分类结果.
表 3 ScanObjectNN 数据集上各种方法的形状分类对比结果 (%)
方法 期刊或会议/年份 方法类别 OBJ_BG OBJ_ONLY PB_T50_RS
PointNet [3] CVPR/2017 73.3 79.2 68.0
PointNet++ [4] NIPS/2017 82.3 84.3 77.9
DGCNN [5] TOG/2019 82.8 86.2 78.1
PointMLP [43] ICLR/2022 监督学习 - - 85.4±0.3
PointNeXt [44] NIPS/2022 - - 87.7±0.4
P2P-RN101 [29] NIPS/2022 - - 87.4
P2P-HorNet [29] NIPS/2022 - - 89.3
[17]
Point-BERT CVPR/2022 87.43 88.12 83.07
[21]
MaskPoint ECCV/2022 89.30 88.10 84.30
[19]
Point-MAE ECCV/2022 90.02 88.29 85.18
[20]
Point-M2AE NIPS/2022 91.22 88.81 86.43
自监督学习
[30]
ACT ICLR/2023 93.29 91.91 88.21
[35]
ReCon ICML/2023 95.35 93.63 91.26
[28]
I2P-MAE CVPR/2023 94.15 91.57 90.11
本文方法 - 96.22 94.10 92.44