
Page 37 - 摩擦学学报2025年第10期
P. 37
1434 摩擦学学报(中英文) 第 45 卷
[6]
臂梁短轴方向运动为主 ;而在黏附力测量和高分辨 副的力学特性进行分析.
[7]
率形貌测量中 ,以悬臂梁长轴方向运动为主. 通过结
合2类运动方式,可以实现对纳米机械系统(NEMS)的力 1 试验部分
学和摩擦性能表征以及薄膜与涂层等的性能研究 [8-9] . 1.1 试样和测试装置
前文所述的悬臂梁支撑摩擦副在长轴方向的相 试验所用试样为上海宇航系统工程研究所提供
对运动在使用过程中存在着固有问题,即摩擦过程中 某型号导电滑环的环刷副,摩擦副结构形式为悬臂梁
法向力与摩擦力存在着耦合效应,导致其作为精密摩 支撑触头-平面摩擦副. 悬臂梁材料为铍青铜,触头材
擦副在摩擦磨损过程中,接触区域的法向力与摩擦力 料为AuAgCuZn合金,汇流盘环道为Au-Co合金,触头
大小难以稳定,进而影响系统的可靠性. 例如,在空间 与环道表面粗糙度R 小于0.4 μm. 汇流盘环道的维氏
a
导电滑环的应用场景下,一方面,法向力的变化会改 显微硬度在0.25 N载荷条件下保持20 s后测量;触头
[15]
变摩擦区域接触条件 [10-14] 、影响磨损类型 ;另一方 的维氏显微硬度在2 N载荷条件下保持15 s后测量. 主
面,法向力的大小会引起接触区域导电通路的变化,影 要材料及表面硬度列于表1中.
响电接触稳定性 [16-17] ,对伴生电弧的形成具有重要影 针对此特定环刷副结构形式,搭建了对应的摩擦
[18]
响 . 因此,针对该类悬臂结构,控制其法向力与摩擦力 磨损试验台,进行摩擦磨损试验,试验台主要功能包
进而改善接触性能以及摩擦磨损寿命具有重要意义. 括:(1) 3平动自由度实现触头-汇流盘接触区域的对准
对某型号导电滑环的摩擦性能进行测试,导电滑 和竖直方向加载,竖直加载方向使用的分辨率可达到
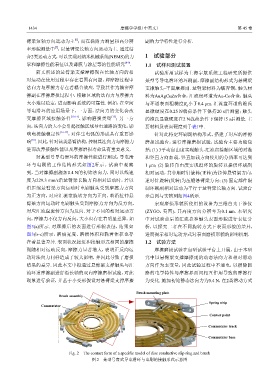
环与电刷的工作结构形式如图2所示。试验中观察 1 μm;(2) 旋转自由度实现滑环的旋转以提供环刷副
到,当对摩擦副施加0.4 N的初始法向力,同时以线速 相对运动,其中顺时针旋转(正转)为拉伸悬臂梁方向,
度为229.3 mm/s沿悬臂梁长轴方向相对运动时,若以 逆时针旋转(反转)为压缩悬臂梁方向;(3) 固定部件限
沿压缩悬臂梁方向运动时电刷触头受到摩擦力方向 制环刷副相对运动为平行于悬臂梁长轴方向. 试验台
为正方向,对应汇流盘旋转方向为正向,若沿拉伸悬 示意图与实物图如图4所示.
臂梁方向运动时电刷触头受到摩擦力方向为反方向, 宏观磨损形貌所使用的设备为三维白光干涉仪
对应汇流盘旋转方向为反向. 对于不同的相对运动方 (ZYGO,美国),其高度方向分辨率为0.1 nm. 本研究
向,摩擦力不仅方向反向,大小也存在着明显差异,如 中对试验前后的汇流盘和触头表面形貌进行表征分
图3(a)所示. 对摩擦后的表面进行形貌表征,结果如 析,以探究二者在不同旋转方式下表面形貌的差异,
图3(b~c)所示,磨痕宽度、磨损体积和黏着体积也存 进而揭示相对运动方式对表面磨损形貌的影响机制.
在着显著差异. 表面状况接近和接触形式相同的摩擦 1.2 试验方法
副随相对运动反向,摩擦力显著增大,表明正反向运 摩擦磨损试验在自研试验平台上开展,由于本研
动对法向力同样造成了较大影响,并因此导致了磨损 究中以悬臂梁支撑摩擦副的动态法向力和相对滑动
结果的差异. 因此本文中拟通过悬臂梁支撑触头与汇 方向作为主变量,因此试验过程中不通电,以摒除回
流环道摩擦副进行沿长轴的双向摩擦磨损试验,对此 路的电学特性与摩擦界面间相互作用导致的摩擦行
现象进行验证,并基于小变形假设对悬臂梁支撑摩擦 为变化. 施加初始静态法向力为0.4 N,在2类滑动方式
Brush mounting plate
Brush assembly
Spring strip
Commutator
Contact point
Commutator track
Commutator base
Fig. 2 The contact form of a specific model of disc conductive slip ring and brush
图 2 某型号盘式导电滑环与电刷的接触形式示意图