
Page 107 - 《摩擦学学报》2021年第4期
P. 107
550 摩 擦 学 学 报 第 41 卷
贝阻尼密封直接刚度均增大. 交叉刚度均为正值,且 稳定性得到有效改善. 错开角度为33.75°时的有效阻
频率依赖性较低. 错开角度为33.75°时,其密封交叉刚 尼约为0°时的111%~121%.
度相对较低. 2.4 密封腔深度对动力特性影响
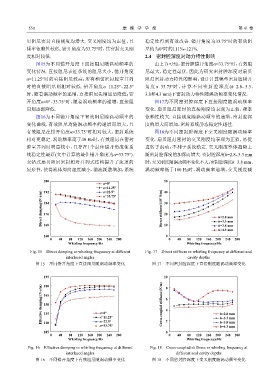
图15为不同错开角度下直接阻尼随涡动频率的 由上节可知,密封腔错开角度α=33.75°时,有效阻
变化情况. 直接阻尼表征系统的阻尼大小,错开角度 尼最大,稳定性最优. 因此为研究密封腔深度对扇贝
α=11.25°时的直接阻尼较高;所有相邻密封腔室并列 阻尼密封动力特性的影响,设计计算模型密封腔错开
时的直接阻尼则相对较低. 错开角度α=11.25°、22.5° 角度α=33.75°时,计算不同密封腔深度(h=2.8、3.3、
时,随着涡动频率的递增,直接阻尼先增加后降低;错 3.8和4.3 mm)下密封动力特性随涡动频率变化情况.
开角度α=0°、33.75°时,随着涡动频率的递增,直接阻 图17为不同密封腔深度下直接刚度随涡动频率
尼则逐渐降低. 变化. 扇贝阻尼密封的直接刚度均表现为正值,频率
图16为不同错开角度下有效阻尼随涡动频率的 依赖性较大. 直接刚度随涡动频率的递增、密封腔深
变化曲线. 有效阻尼均随涡动频率的递增而增大,且 度的增大而增加,密封系统静态稳定性越佳.
有效阻尼在错开角度α=33.75°时相对较大,密封系统 图18为不同密封腔深度下交叉刚度随涡动频率
相对更稳定. 涡动频率高于40 Hz时,有效阻尼在密封 变化. 扇贝阻尼密封的交叉刚度均表现为正值,易促
腔室并列时明显较小,且存在1个最佳错开角度使系 进转子涡动,不利于系统稳定. 交叉刚度整体趋势上
统稳定性最好(文中计算的最佳错开角度为α=33.75°). 随密封腔深度的加深而增大. 密封腔深度h=2.8、3.3 mm
交错式扇贝阻尼密封相对并列式结构提升了流道的 时,交叉刚度随涡动频率变化不大;密封腔深度h=3.8 mm、
复杂性,使得流体周向速度减小、湍流耗散增加,系统 涡动频率低于160 Hz时,涡动频率递增,交叉刚度减
200 50
α=0°
α=11.25° 40
α=22.5°
Direct damping/(N·s/m) 184 Direct stiffness/(10 3 N/m) 30 h=2.8 mm
192
α=33.75°
20
176
h=3.3 mm
10
168
h=3.8 mm
h=4.3 mm
160 0
0 40 80 120 160 200 240 280 0 40 80 120 160 200 240 280
Whirling frequency/Hz Whirling frequency/Hz
Fig. 15 Direct damping vs whirling frequency at different Fig. 17 Direct stiffness vs whirling frequency at different seal
interlaced angles cavity depths
图 15 不同错开角度下直接阻尼随涡动频率变化 图 17 不同密封腔深度下直接刚度随涡动频率变化
195 10 8
Effective damping/(N·s/m) 165 α=0° Cross-coupled stiffness/(N/m) 6 4 h=2.8 mm
180
150
135
α=11.25°
α=22.5°
h=3.8 mm
120
α=33.75° 2 h=3.3 mm
h=4.3 mm
105 0
0 40 80 120 160 200 240 280 0 40 80 120 160 200 240 280
Whirling frequency/Hz Whirling frequency/Hz
Fig. 16 Effective damping vs whirling frequency at different Fig. 18 Cross-coupled stiffness vs whirling frequency at
interlaced angles different seal cavity depths
图 16 不同错开角度下有效阻尼随涡动频率变化 图 18 不同密封腔深度下交叉刚度随涡动频率变化