
Page 26 - 《摩擦学学报》2020年第6期
P. 26
第 6 期 郭曼利, 等: 不同压力角下自由端面对渐开线直齿轮弹流润滑性能的影响 709
形的计算仍是基于如图3所示的弹性半空间,采用经 P 与P '关于表面1对称;在垂直半空间V 中,载荷
v1
2
v1
[23]
典的Boussenisq积分 ,这显然忽略了轮齿两侧自由 P 与P '关于表面1对称. 由于对称性,上述对称载荷
v2
v2
端面的影响,而自由端面影响的实质在于轮齿表面的 在其对称表面上只产生正应力而无切应力. 将半空间
弹性变形基于有限长空间进行计算. 为使齿轮弹流润 H、V 和V 以表面1,I,II为基准进行重叠,即可构造出
1
2
滑计算结果更加精确,本文基于Zhang等 [16-18] 利用重叠 以表面1,I,II为边界的有限长空间,如图4所示. 在表
法和矩阵法构造出的有限长空间,建立考虑自由端面 面I上由P 、P 与P '引起的切应力和在表面II上由
v2
h3
v2
影响的渐开线直齿轮弹流润滑模型. 为此需首先构造 P 、P 与P '引起的切应力与相对应表面上的正应力
v1
v1
h2
如图4所示的包含自由端面的有限长空间. 相比太小,因此可忽略不计 [15-17] . 此时,表面Ⅰ上包括
由 载 荷 P 、 P 和 P 引 起 的 正 应 力 σ , 载 荷 P 与
h1
h3
h2
v2
h1
P '引起的正应力σ Ⅱ-Ⅰ 及载荷P ;表面Ⅱ上包括P ,
h1
v1
v2
Free
P 和P 引起的正应力σ ,由载荷P 与P '引起的正
h2
v1
h3
h2
v1
应力σ Ⅰ−Ⅱ 及载荷P ;表面1上作用有P 与P '引起的
v1
v2
v1
正应力σ Ⅰ−1 ,载荷P 与P '引起的正应力σ Ⅱ−1 及载荷
v2
v2
P . 此时,表面Ⅰ和Ⅱ为自由端面,对应于轮齿两侧
h1
的自由端面;表面1对应轮齿表面,其上作用的分布载
荷P(x,y)可由雷诺方程确定. 因此,3个表面应满足的
Free End Surface 受力条件如下:
−P h1 +σ I−1 +σ II−1 = −P (6)
Fig. 2 Schematic diagram of involute spur gear tooth
图 2 渐开线直齿轮轮齿示意图 −P v1 +σ h1 +σ II−I = 0 (7)
−P v2 +σ h2 +σ I−II = 0 (8)
以上等式中的变量,P 、P 和P 为未知量,其他
v1
v2
h1
应力则是这3个未知量作用于半空间后在对称面上产
生的应力,可表示为这3个未知量的函数. 利用对称
性,求解方程组(6~8)可得:
Elastic half-space P h1 = MA· P (10)
(9)
P v1 = MB· P
P v2 = MC· P (11)
其中MA、MB和MC是只与网格结构及材料特性有关
的系数矩阵. 在网格结构、材料弹性模量和泊松比都
Fig. 3 Schematic diagram of gear contact
确定的情况下,只需计算1次上述矩阵,并可重复使用.
calculation based on half-space
图 3 齿轮接触计算基于半空间示意图 因而可大大节省计算时间,提高计算效率. 当压力P由
雷诺方程确定后,载荷P 、P 和P 便可求得.
h1
v2
v1
1.2.1 有限长空间的构造
本文中有限长空间的构造采用Hetenyi 提出的 y
[10]
叠加法,其基本思想如下:在半空间表面上作用有对
称载荷时,其中间对称面上将只存在正应力而无切应 P(x, y) x
力;然后通过叠加施有对称载荷的半空间将对称面上
z
的正应力消除,此时该对称面即成为无应力的自由端
面. 因此,可通过叠加3个施有对称载荷的半空间来实
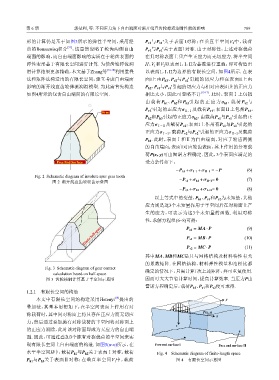
现有限长空间上自由端面的构造. 如图5(a~c)所示,在 Free end surface I Free end surface II
水平半空间H中,载荷P 与P 关于表面Ⅰ对称,载荷 Fig. 4 Schematic diagram of finite-length space
h1
h2
P 与P 关于表面Ⅱ对称;在垂直半空间V 中,载荷 图 4 有限长空间示意图
1
h3
h1