
Page 10 - 《摩擦学学报》2020年第3期
P. 10
276 摩 擦 学 学 报 第 40 卷
燥条件下最大静摩擦系数大的原因. 不管是干燥还是 数的影响,本研究中测量了指腹与物体接触区内的指
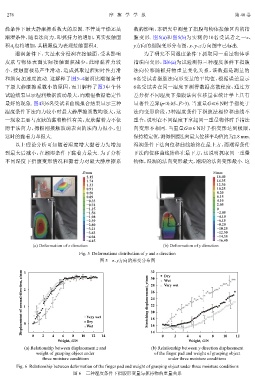
潮湿条件,随着法向力,即抓持力的增加,真实接触面 腹变形. 图5(a)和图5(b)为实测的10名受试者之一z、
积A 也将增加,其极限值为表观接触面积A. y方向的指腹变形分布图,x、y、z方向图中已标出.
r
湿润条件下,大量水分浸润在接触面,受其影响 为了研究不同湿度条件下抓取同一重量物体手
皮肤与物体表面实际接触面积减少,此时黏着力较 指法向变形,图6(a)为试验测得三种湿度条件下指腹
小,接触面极易产生滑动,造成抓取过程短时性打滑 法向位移随抓持物重量变化关系,该数据是测量的
和纵向加速度波动. 这解释了图3~4湿润比潮湿条件 6名受试者指腹法向形变量的平均值,根据误差显示
下最大静摩擦系数小的原因,而且解释了图3中个体 6名受试者在同一湿度下测得数据离散程度,通过方
试验结果显示湿润数据波动最大,而潮湿数据稳定性 差分析不同湿度下指腹法向位移量在统计学上具有
最好的现象. 图4对6名受试者曲线拟合结果显示三种 显著性差异(p<0.05、F>3). 当重量G≤6 N时手指处于
湿度条件下法向力较小时最大静摩擦系数均很大,这 法向变形阶段,3种湿度条件下指腹法相位移曲线不
一现象主要与皮肤的黏着特性有关,皮肤黏着力不依 重合,说明在不同湿度下拿起同一重量物体时手指法
附于法向力,拇指刚接触玻璃表面的法向力很小,但 向变形不相同. 当重量G≥6 N时手指变形达到极限,
这时的黏着力却很大. 保持稳定值,测得指腹法向最大位移平均值约为2.8 mm.
以上理论分析可知随着湿度增大黏着力先增加 湿润条件下法向位移曲线始终在最上方,而潮湿条件
到最大后减小,在潮湿条件下黏着力最大. 为了分析 下法向位移曲线始终在最下方,这说明抓取同一重量
不同湿度下指腹变形情况和黏着力对最大静摩擦系 物体,湿润的法向变形最大,潮湿的法向变形最小. 这
Z/mm Y/mm
2.15 16.40
1.74 14.35
y 1.33 12.30
z 10.25
x 0.91
0.50 8.20
0.09 6.15
−0.33 4.10
−0.74 2.05
−1.15 0
−1.56 −2.05
−1.98 y −4.10
−2.39 −6.15
−2.80 x −8.20
−3.21 −10.25
−3.63 −12.30
−4.04 −14.35
−4.45 −16.40
(a) Deformation of z direction (b) Deformation of y direction
Fig. 5 Deformations distribution of y and z direction
图 5 z、y方向的形变分布图 Dry
Displacement of normal direction, z/mm 2 1 Very wet Stretching displancement, y/mm 28 Very wet
32
3
30
Wet
26
24
22
20
18
0
Wet
14
0 2 4 6 8 10 Dry 12 14 16 0 2 4 6 8 10 12
Weight, G/N Weight, G/N
(a) Relationship between displacement z and (b) Relationship between y direction displacement
weight of grasping object under of the finger pad and weight of grasping object
three moisture conditions under three moisture conditions
Fig. 6 Relationship between deformation of the finger pad and weight of grasping object under three moisture conditions
图 6 三种湿度条件下指腹形变量与抓持物的重量关系