
Page 8 - 《摩擦学学报》2020年第3期
P. 8
274 摩 擦 学 学 报 第 40 卷
超声波加湿器加湿的时间来标定湿度值范围,如图1(d). 力,该状态下拉力计施加在悬挂装置的拉力等于悬挂
拇指位置被标定在距离加湿器底边缘(6 cm,18 cm)位 装置受的重力,悬挂装置自重13 N,此刻指针在13 N
置,加湿器喷出水雾对指腹进行加湿,在到达规定时 刻度位置;然后,试验辅助人员按下力信息采集按钮
间段手指立刻拿开进行湿度测量,记录所用时间和该 和应变测量系统图像采集按钮;最后,受试者接到试
时间段下的相对湿度值. 该试验邀请10名健康受试者 验辅助人员的开始指令后用拇指缓慢下拉悬挂装置.
(5名男性,5名女性,年龄20至25岁)参加,试验开始前 下落过程中眼睛直视拉力计指针,保持指针匀速转动
受试者用肥皂水将手清洗干净并自然干燥15 min,每 直到指针到26 N刻度位置停止下拉.
人拇指指腹通过加湿器加湿,如图1(d)方式,同一时间 试验过程中,悬挂装置的铅直方向受力可用式
段测3次,每次测量旋转湿度测试仪探头,在已测过指 (1)表示. 其中F 表示手指的摩擦力,F 表示拉力计受
P
μ
腹位置的周围继续测量,选择指腹4个不同区域平均 到的拉力,G表示物体的重量.
值作为1次测量结果. 同一时间段共测10人,取这10人 F P = F µ +G (1)
试验的平均湿度值作为该时间段下的相对湿度值. 共 灵巧操作中法向力的范围在0~5 N [13, 15] ,根据本试
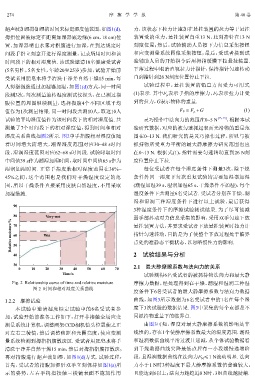
测量了7个时间段下的相对湿度值,得到时间和相对 验研究数据,对应的被匀速抓起表面光滑物的重量范
湿度关系曲线如图2所示. 图2中手指腹相对湿度值随 围在0~13 N. 我们研究的是灵巧操作过程,所以与被
着时间增大而增大,潮湿湿度范围对应30~48 s时间 抓持物所受重力平衡的最大静摩擦力研究范围也应
段,湿润湿度范围对应62~68 s时间段. 试验时取时间 在0~13 N. 根据式(1),指针需要匀速转动直到26 N刻
中间值39 s作为潮湿加湿时间,取时间中间值65 s作为 度位置停止下拉.
湿润加湿时间. 正常手指皮肤相对湿度范围在36%~ 每位受试者在每个湿度条件下测量3次,除干燥
45%之间,这个范围也是我们对干燥湿度设定的范 条件外同一湿度下每次重复试验均需要加湿器加湿
围,所以干燥条件直接采用皮肤自然湿度,不用采取 (潮湿加湿39 s、湿润加湿65 s、干燥条件不加湿),每个
加湿措施. 湿度条件下共测量6名受试者. 受试者分别在干燥、潮
湿和湿润三种湿度条件下进行以上试验,最后获得
90
3种湿度条件下的摩擦试验测试结果. 为了尽可能减
80 Very wet 弱手部抖动对力信息采集的影响,采用双手匀速下放
Relative moisture/% 70 Wet 悬挂装置方法,并要求受试者下放悬挂装置时拉力计
指针匀速转动,目的是为了使整个下放过程处于临界
60
点处的准静态平衡状态,以忽略惯性力的影响.
50
40 2 试验结果与分析
30 2.1 最大静摩擦系数与法向力的关系
0 10 20 30 40 50 60 70
Time/s 试验测得6名受试者的被抓持物法向力和最大静
Fig. 2 Relationship curve of time and relative moisture 摩擦力数据,经处理得到在干燥、潮湿和湿润三种湿
图 2 时间和相对湿度关系曲线
度条件下6名受试者的最大静摩擦系数与法向力数据
1.2.2 摩擦试验 曲线,如图3所示数据为6名受试者中的1名在每个湿
本试验中邀请湿度标定试验中的6名受试者参 度下3次试验的数据结果. 图3中采集的每个点都是不
加,试验开始前准备工作如下:打开非接触全场应变 同抓持物重量下的临界点.
测量系统计算机,调整两架CCD相机镜头位置使之正 由图3可知,湿度对最大静摩擦系数的影响是非
对左右三棱镜,然后调整焦距和光圈亮度,使应变测 线性的,存在1个使静摩擦系数最大的湿度范围. 潮湿
量系统检测到拇指指腹散斑区. 受试者用肥皂水将手 和湿润数据曲线平滑过渡且递减,从个体试验数据看
清洗干净并自然干燥15 min,然后对拇指指腹打散斑; 到干燥数据曲线突降最低点后有一小段缓慢递增阶
再对指腹进行超声波加湿,如图1(d)方式. 试验过程: 段,且湿润数据曲线在法向力F ≤1 N波动明显. 法向
N
首先,受试者的指腹加湿后双手立刻保持如图1(a)所 力小于1 N时3种湿度下最大静摩擦系数值普遍较大,
示的姿势,左右手拇指接触三棱镜表面不施加作用 且能达到6以上;法向力越趋近0 N时,3组曲线越陡峭.