
Page 7 - 《摩擦学学报》2020年第3期
P. 7
第 3 期 陈强, 等: 人手指腹与光滑物体间的静摩擦力与湿度和抓持力的关系 273
Signal acuistion and
data analysis computer
Hanging ring
Clamping device
Six-dimensional
force sensor
Dynamometer
Right prism
Hanging device
Left prism
Plastic clamping
Workbench frame
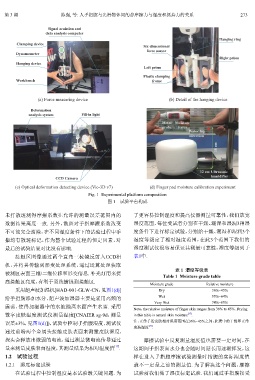
(a) Force measuring device (b) Detail of the hanging device
Deformation
analysis system Fill-in light
Metal Moisture
probe tester
Water fog
direction
18 cm
12 cm Ultrasonic
humidifier
CCD Camera
(c) Optical deformation detecting device (Vic-3D v7) (d) Finger pad moisture calibration experiment
Fig. 1 Experimental platform composition
图 1 试验平台构成
未打散斑测得摩擦系数在允许的测量误差范围内的 了更容易控制湿度和提高仪器测量可靠性,我们放宽
数据结果高度一致. 另外,散斑对手指摩擦系数改变 湿度范围,每位受试者分别在干燥、潮湿和湿润3种湿
不可能完全消除,在不同湿度条件下的试验过程中手 度条件下进行标定试验,分别给干燥、潮湿和湿润3个
指均有散斑标记,作为整个试验过程的恒定因素,对 湿度等级定了相对湿度范围,在此3个范围下我们的
最后的试验结果对比没有影响. 湿度测试仪很容易保证其测量可靠性,湿度等级列于
接触区图像通过两个直角三棱镜反射入CCD相 表1中.
机,并将其传输到形变处理系统,通过运算处理获取
表 1 湿度等级表
被测区表面三维/二维位移和形变信息. 补光灯用来提
Table 1 Moisture grade table
高接触区亮度,有利于系统捕捉到接触区.
Moisture grade Relative moisture
采用超声波加湿机[HAD-001-GLW-CN,见图1(d)] Dry 36%~45%
给手指腹添加水分,超声波加湿器主要是采用高频的 Wet 55%~64%
Very Wet 74%~83%
震荡,使得加湿器中的水被抛离水面产生水雾. 采用
Note:the relative moisture of finger skin ranges from 36% to 45%. Drying
数字皮肤湿度测试仪测量湿度[CNAIER sg-9d,测量 in this table is natural skin moisture .
[17]
误差±3%,见图1(d)]),试验中控制手指腹湿度,测试仪 注:正常手指皮肤相对湿度范围在36%~45%之间,此表中的干燥即正常
[17]
皮肤湿度 .
通过前端两个金属头接触皮肤表面来测量皮肤湿度,
探头会释放出微弱的电流,通过测量微电流传导通过 摩擦试验中反复测量湿度值也需要一定时间,在
[17]
量来测量皮肤表面湿度,其测量结果为相对湿度值 . 这期间手指表面水分也会随时间延长而逐渐挥发,这
1.2 试验过程 样在进入手指腹摩擦试验测量时指腹的实际湿度值
1.2.1 湿度标定试验 就不一定是之前的测量值. 为了解决这个问题,摩擦
在试验过程中控制湿度是本试验最关键问题. 为 试验前我们做了湿度标定试验. 我们通过手指腹接受