
Page 75 - 《爆炸与冲击》2026年第5期
P. 75
第 46 卷 田浩帆,等: 基于PAWN全局敏感性分析与智能优化算法的岩石RHT本构参数反演 第 5 期
Step 1 Obtain rock mechanics parameters Start
Step 2 RHT constitutive parameter Initial random position and
calibration velocity vector
Step 3 Parameter sensitivity analysis Generate the initial solution x
and compute the fitness(x)
Loop until all
Determine upper and lower limits particles exhaust
Step 4 of inversion parameters If fitness(x) is better than g best
Intelligent optimization algorithm Then g best =p best
Step 5
selection
Updating population velocity Loop until all
Step 6 Determination of objective function
and position max iter
Establishment of SHPB numerical
Step 7 Updating
model parameters
Convergence
Step 8 Iterative solution criterion No
Yes
Step 9 Inversion results acquisition Result output
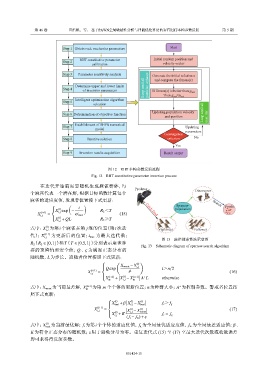
图 12 RHT 本构参数反演流程
Fig. 12 RHT constitutive parameter inversion process
在迭代开始前需要随机生成麻雀群体,每
Predator Discoverer
个麻雀代表一个潜在解,根据目标函数计算每个
麻雀的适应度值,发现者位置按下式更新:
Sparrow Search
Å ã Foods
i population
(t)
X i,j exp − R 2 <T Catch food
X (t+1) = ςi max (15)
i,j
(t)
X i,j + QL R 2 ≥T
(t) t 次迭
式中: X i,j 为第 i 个麻雀在第 j 维的位置(第 Vigilantes Follower
代 ) ; X i,j 为 更 新 后 的 位 置 ; i max 为 最 大 迭 代 数 ;
(t+1)
图 13 麻雀搜索算法示意图
T T ∈ [0.5,1] )分别表示麻雀种
(
R 2 R 2 ∈ [0,1] )和 (
Fig. 13 Schematic diagram of sparrow search algorithm
ς 为满足正态分布的
群的预警值和安全值; Q 、
L 为步长。追随者位置按照下式更新:
随机数,
Ç å
(t)
X worst − X i,j
Qexp i>n/2
(t+1)
X i,j = i 2 (16)
(t+1) (t) (t+1) +
X m + X i,j − X m A L otherwise
X (t+1) 为第 m + 为控制参数。警戒者位置按
m
式中: X worst 为当前最差解, 个个体的更新位置; n 为种群大小; A
照下式更新:
(t) (t) (t)
X +β X i,j − X
best best f i > f g
(t+1)
X i,j = (t) (t) (17)
(t)
X i,j + K X i,j − X worst f i = f g
( f i − f w )+ε
X (t) β 、
式中: best 为当前最优解; f i 为第 i 个个体的适应度值, f g 为全局最优适应度值, f w 为全局最差适应值;
ε 用于避免分母为零。重复迭代式 (15) 至 (17) 至最大迭代次数或收敛误差
K 为符合正态分布的随机数;
即可求得待反演参数。
051424-15