
Page 83 - 《真空与低温》2026年第2期
P. 83
202 真空与低温 第 32 卷 第 2 期
机工作,制冷机中频的特征信号在位置 1 并不明显。
位置 2、位置 3 均有制冷机低频、中频信号存在,说
明对制冷机以及电机工作特征表征均较为准确,其
X
中位置 2 传感器紧贴被测结构,在制冷机工作时不
位置2 Z Y
会产生位移;位置 3 在振动过程中易发生位移,因
X 此优先选择传感器贴装位置 2,即制冷机与杜瓦耦
合面。
Z
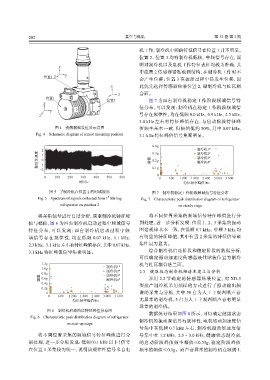
位置1 位置3 图 7 为四台制冷机稳定工作阶段频域信号特
X
征分布,可以发现:制冷机在稳定工作阶段频域信
Y
Z 号存在规律性,均在低频 0.0 kHz、0.9 kHz、2.3 kHz、
3.0 kHz 左右有特征峰值存在,与启动阶段特征峰
图 4 传感器贴装位置示意图 值频率基本一致,但幅值低约 50%,其中 0.07 kHz、
Fig. 4 Schematic diagram of sensor mounting position 3.1 kHz 特征峰值信号集聚明显。
0.4g
2 1 0.3g 制冷机1 # #
振动加速度 −1 0 幅值 0.2g 制冷机3 # #
制冷机2
制冷机4
0.1g
−2
0
0 100 200 300 400 500 600 0 600 1 200 1 800 2 400 3 000 3 600
时间/s 特征频率峰值/Hz
图 5 1 制冷机在位置 2 的时域波形 图 7 制冷机稳定工作阶段频域信号特征分布
#
#
Fig. 5 Spectrum of signals collected from 1 Stirling Fig. 7 Characteristic peak distribution diagram of refrigerator
refrigerator on position 2 on steady stage
将采集信号进行自谱分析,获取制冷机特征峰 将不同位置采集的频域信号特征峰值进行分
值与幅值,图 6 为四台制冷机启动过程中频域信号 别处理,进一步分析发现:位置 1、2、3 采集的振动
特征分布,可以发现:四台制冷机启动过程中频 图谱规律基本一致,在低频 0.7 kHz、中频 3 kHz 均
域信号存在规律性,均在低频 0.07 kHz、1.1 kHz、 有明显的特征峰值,其中位置 2 采集的特征信号聚
2.3 kHz、3.1 kHz 左右有特征峰值存在,其中 0.07 kHz、 集性最为显著。
3.1 kHz 特征峰值信号集聚明显。 综合制冷机启动阶段和稳定阶段的数据分析,
可以确定振动加速度传感器最佳贴装位置为制冷
1.2g 机与杜瓦耦合法兰面。
制冷机1 #
1.0g
制冷机2 # 2.3 健康状态制冷机频谱库建立与分析
0.8g 制冷机3 #
幅值 0.6g 制冷机4 # 采用 2.2 节确定的传感器贴装位置,对 XD-5
0.4g
型批产制冷机采用抽样的方式进行了振动输出频
0.2g
0 谱的采集与分析,其中 58 台为人工主观判断声音
0 600 1 200 1 800 2 400 3 000 3 600
特征频率峰值/Hz 无异常的制冷机,5 台为人工主观判断声音有明显
异常的制冷机。
图 6 制冷机启动阶段特征峰值分布图
数据统计结果如图 8 所示,可以确定健康状态
Fig. 6 Characteristic peak distribution diagram of refrigerator
制冷机的振动频谱具有规律性,电机转动加速度信
on start-up stage
号集中在低频 0.7 kHz 左右,制冷机振动加速度信
将不同位置采集的频域信号特征峰值进行分 号集中在 1.2 kHz、2.3~3.0 kHz,健康状态制冷机
别处理,进一步分析发现:低频(0.1 kHz 以下)信号 的启动阶段峰值频率幅值≤0.35g,稳定阶段峰值
在位置 1 采集较为统一,说明该规律性信号来自电 频率的幅值≤0.1g。而声音异常的制冷机在频谱上