
Page 95 - 《真空与低温》2026年第1期
P. 95
92 真空与低温 第 32 卷 第 1 期
纤集成单边带调制拉曼激光源,其偏振消光比优 光学元件黏合在石英玻璃板上,实现模块高度集成
于 27 dB,相对功率漂移约为 0.1%,功率比波动约 且保持较高的空间激光利用率。相位噪声对重力
−9
为 0.3%。主从激光器通过 OPLL 锁定,绝对重力测 测量灵敏度的贡献为 4.28×10 g Hz −1/2 ,重力测量灵
−7
−8
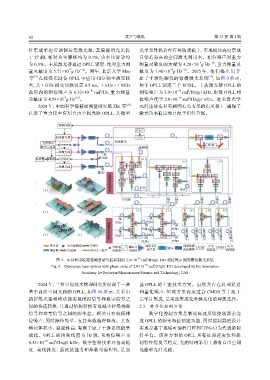
量灵敏度为 5.71×10 g Hz −1/2 。同年,北京大学 Mao 敏度为 1.48×10 g Hz −1/2 。2025 年,他们提出用于
等 [57] 在拉曼光制备 OPLL 中应用 GHz 频率跳变技 原子干涉陀螺仪的紧凑激光系统 ,如图 9 所示,
[59]
术,其 1 GHz 跳变切换仅需 0.5 ms。1 kHz~1 MHz 两个 OPLL 锁定三个 ECDL。主从激光器 OPLL 的
2
−10
2
−10
范围内的相位噪声为 6.32×10 rad /Hz,重力测量 相位噪声为 2.0×10 rad /Hz@1 kHz,次级 OPLL 相
灵敏度为 4.59×10 g Hz −1/2 。 位噪声优于 2.0×10 rad /Hz@1 kHz。毫米级光学
−7
−10
2
2024 年,中国科学院精密测量研究院 Zhu 等 [58] 元件连接在具有相同石英支架的石英板上,确保了
在原子重力仪中应用自由空间光路 OPLL,其微型 激光功率稳定性且便于组件升级。
锁频伺服
PDRO (a)
初级激光器 EDFA PPLN EOM Rb
初级激光
直接数字
频率合成器 光学锁相环 监测器 EOM
一级激光器 EDFA PPLN
二级
振荡嚣 混频器 光学锁相环 激光器1 (b)
(c) (d)
二级激光器 EDFA PPLN
二级 AOM AOM
激光2 AOM AOM AOM
主动光学模组 AOM (f) AOM AOM
(a) (b) 拉曼 吹送
冷却1 冷却2 冷却3 冷却4 冷却5
再泵浦
(c) (d) (e) (e) (f) (f) (f)
三维
二维 冷却1
冷却1
被动光学模组 二维 冷却3 三维 冷却3
二维
三维
(e) (f) 冷却2 二维 三维 三维冷却5 三维冷却6 三维冷却7 三维冷却8 三维冷却9 三维冷却10
冷却2
冷却4 冷却4
准直器 光电探测器 半波片 掺铒光纤 周期性极
分路器 偏振分 EDFA Rb 铷室 PPLN AOM 声光 EOM 电光
耦合器 反射镜 四分之一波片 合路器 光棱镜 放大器 化铌酸锂 调制器 调制器
图 9 中国科学院精密测量研究院研制的 2.0×10 rad /Hz@1 kHz 相位噪声的陀螺仪激光系统
2
−10
−10 2
Fig. 9 Gyroscope laser system with phase noise of 2.0×10 rad /Hz@1 kHz developed by the Innovation
Academy for Precision Measurement Science and Technology,CAS
2024 年,兰州空间技术物理研究所研制了一种 前 OPLL 的主流技术方案。虽然其存在处理延迟
基于自由空间光路的 OPLL,如图 10 所示,其采用 和量化噪声,但该方案高度适合 CMOS 等主流工
的拉曼光鉴相模块能实现模拟信号和数字信号之 艺单片集成,是实现集成化和模块化的理想选择。
间的快速转换,且通过倍频转换有效减小拉曼拍频 2.3 数字化控制方案
信号和参考信号之间的频率差。模块具有较低相 数字化控制方案是利用高速反馈控制器去完
位噪声,同时操作简单、支持参数编程修改。其次 成 OPLL 的频率相位锁定功能,同时控制器的设计
模块体积小、稳定性高,有利于原子干涉系统的集 实现是基于现场可编程门阵列(FPGA)为代表的硬
成化。OPLL 的拍频线宽为 Hz 级,且相位噪声为 件平台。该种方案的 OPLL 具有处理速度快和控
−10
2
6.32×10 rad /Hz@1 kHz。数字鉴相技术具备高精 制特性优良等特点,光路结构采用上兼有自由空间
度、高线性度、强抗扰能力和参数可编程性,是当 光路和光纤光路。