
Page 85 - 《真空与低温》2025年第4期
P. 85
500 真空与低温 第 31 卷 第 4 期
其重力方向与光压的水平方向垂直,实现二者解耦。 力也被调制。待测实验件吸收入射光升高温度是
竖直摆及其转向系统示意图如图 2 所示。 持续的单调过程,其影响主要由直流和低频分量构
成,投影到特定的调制频率的分量很小,因此,与不
用斩波器调制入射光的情形相比,入射光调制可显
著抑制实验件两面温度差异引起的光压测量误差,
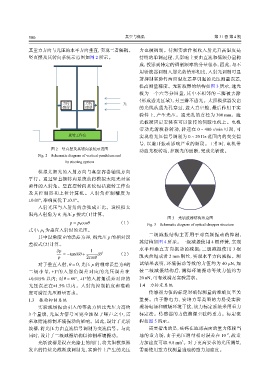
提高测量精度。光斩波器的结构如图 3 所示,遮光
板为一个六等分圆盘,其中不相邻的三瓣被去除
(形成透光区域),另三瓣不透光。太阳模拟器发出
力传 力传 光
感器 感器 的光线从通光孔穿过,进入真空舱,最后作用于实
验件上,产生光压。通光孔的直径为 300 mm。遮
光板被固定安装在可以旋转的伺服电机上。电机
带动光斩波器转动,转速在 0~400 r/min 可调,可
旋转工作台 实现将光压信号调制为 0~20 Hz 范围内的交变信
号,以避开振动影响严重的频段。工作时,电机带
图 2 竖直摆及其转向系统示意图 动遮光板转动,控制光的通断,完成光斩波。
Fig. 2 Schematic diagram of vertical pendulum and
its steering system
模拟太阳光的入射方向与真空容器轴线方向
平行。通过竖直摆转向系统获得模拟太阳光对实
验件的入射角。竖直摆转向系统包括旋转工作台
及其控制器和上位计算机。入射角控制精度为
±0.01°,准确度优于±0.1°。
入射光压与入射角的余弦成正比。设模拟太
阳光入射角为 θ,光压 p 按式(1)计算。
图 3 光斩波器结构示意图
p = p 0 cosθ (1) Fig. 3 Schematic diagram of optical chopper structure
式中:p 0 为垂直入射时的光压。
二级减振结构主要用于对高频振动的抑制,
其中设角度 θ 的误差为 δθ,则光压 p 的相对误
其结构如图 4 所示。一级减振使用 4 根弹簧,实现
差按式(2)计算。
水平和垂直方向振动的减振;二级减振使用 3 根
δp 1
= −tanθδθ + δθ 2 (2)
p 2cosθ 凯夫拉绳或者 2 mm 钢丝,实现水平方向减振。测
对于垂直入射, θ = 0,光压 p 的相对误差为 θ的 试结果表明,环境振动等效的力值约为 40 μN,加
二级小量,±1°的入射角误差对应的光压误差在 装二级减振结构后,测得环境振动等效力值约为
±0.015% 以内;对 θ = 60°,±1°的入射角误差对应的 20 nN,可有效满足实验需求。
光压误差在±1.5% 以内。入射角控制精度和准确 1.4 力标定系统
度可满足光压测量要求。 传感器力值的标定对确保测量的准确度至关
1.3 振动抑制系统 重要。由于静电力、安培力等类型的力易受实验
实验现场振动引入的等效力值比光压力高约 现场电场和磁场环境干扰,故力标定系统采用重力
3 个量级,光压力信号可完全湮没于噪声之中,需 标定法。传感器的力值溯源至砝码重力。标定流
采取措施抑制环境振动的影响。因此,设计了光斩 程如图 5 所示。
波器,将光压力由直流信号调制为交流信号。与此 需要指出的是,砝码在地球表面的重力依赖当
−2
同时,设计了二级减振结构以抑制环境振动。 地的重力场,由于光压测量相对误差在 10 ,故重
2
光斩波器是设在光路上的闸门,将太阳模拟器 力加速度可取 9.8 m/s 。对于更高要求的光压测量,
发出的持续光截断成调制光,实验件上产生的光压 需要使用重力仪测量当地的重力加速度。