
Page 86 - 《中国医疗器械杂志》2025年第6期
P. 86
Chinese Journal of Medical Instrumentation 2025年 第49卷 第6期
设 计 与 制 造
表1 电磁铁主要参数 直径为0.8 mm、高度为2 mm的圆柱磁铁沿着该路
Tab.1 Main parameters of electromagnet 径移动。实验的参数设定与1.5节中的参数相同。
项目 数值
10 Bx 10
线圈内径/mm 29 By Bx
By
线圈外径/mm 52 5 Bz 5 Bz
线圈长度/mm 300 0 0
线圈匝数/匝 460 磁感应强度/mT 磁感应强度/mT
最大电流/A 10 −5 −5
铁芯长度/mm 318
−10 −10
根据主要参数设计的实验平台模型如图4所示。 0 2 4 6 8 10 0 2 4 6 8 10
电流/A 电流/A
(a) 电磁铁1 (b) 电磁铁2
(a) Electromagnet 1 (b) Electromagnet 2
10 Bx 10 Bx
By 5 By
Bz
Bz
5
磁感应强度/mT 0 磁感应强度/mT 0
图4 实验平台模型 −5 −5
Fig.4 Model of experimental platform
−10 0 10 −10 0 10
2 实验 2 4 电流/A 6 8 2 4 电流/A 6 8
(c) 电磁铁3 (d) 电磁铁4
2.1 验证磁感应强度与电流的线性近似 (c) Electromagnet 3 (d) Electromagnet 4
10 10
基于1.5节设计的电磁铁结构,搭建实验平台, Bx Bx
By
By
磁感应强度/mT −5 0 磁感应强度/mT −5 0
如图5所示。 5 Bz 5 Bz
−10 −10
0 2 4 6 8 10 0 2 4 6 8 10
电流/A 电流/A
(e) 电磁铁5 (f) 电磁铁6
(e) Electromagnet 5 (f) Electromagnet 6
电磁铁
图6 磁感应强度随电流的变化
z 工作空间
Fig.6 Curve of magnetic induction intensity changing with current
y
x 图7展示了磁铁在一个控制周期内的动作,图7
中红色箭头方向为磁铁目标方向,黑色箭头方向为
图5 实验平台 磁铁当前方向。如图7a所示,磁铁在该控制周期的
Fig.5 Experimental platform
初始状态下,方向与目标方向不一致。因此,首先
首先,进行磁感应强度B与线圈电流I线性近似
关系的验证实验。其次,在输入电流的设计范围内 通过控制磁铁所在位置处的磁感应强度方向来调整
( 磁铁方向。图7b展示了磁感应强度方向的调整步长
0~10 A),测量不同电流下电磁铁轴线交点处的
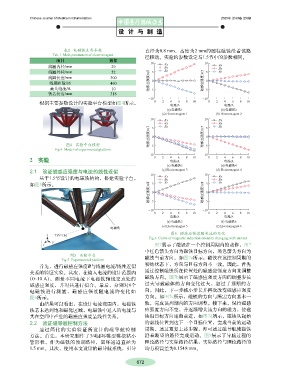
磁感应强度,并对其进行拟合。最后,分别对6个 过大导致磁体的方向变化过大,超过了预期的方
电磁铁进行测量,磁感应强度随电流的变化如 向。因此,下一步减小步长并再次改变磁感应强度
图6所示。 方向。如图7c所示,磁铁的方向与所需方向基本一
由结果可以看出,在设计电流范围内,电磁铁 致,完成该周期内的方向调整。接下来,保持磁感
铁芯未达到饱和磁化区域,电磁铁中通入的电流与 应强度方向不变,并逐渐增大该方向的磁力,使磁
其在空间中产生的磁感应强度呈线性关系。 铁沿目标方向逐渐前进,如图7d所示,磁铁从起始
2.2 验证磁导航控制方法 的虚线位置到达下一个目标位置,完成当前的运动
通过简化的实验验证所设计的磁导航控制 周期。通过重复上述步骤,即可通过磁导航使磁铁
方法。首先,本研究制作了3/4圆环模型模拟粘小 沿着期望的路径完成运动。图8展示了导航过程的
管形状,作为磁铁的预期路径,圆环通道直径为 理论路径与实际路径结果,实际路径与理论路径的
1.5 mm。其次,使用本文设计的磁导航系统,引导 均方根误差为0.154 8 mm。
672