
Page 85 - 《中国医疗器械杂志》2025年第6期
P. 85
Chinese Journal of Medical Instrumentation 2025年 第49卷 第6期
设 计 与 制 造
通过显微镜或相机等反馈方式得到。因此,利用 与目标磁感应强度的角度平均误差为4.81°,磁感
式(9),给定导航过程每一步所需的B和F,可以得 应强度平均误差为0.071 mT。
到各电磁铁电流,实现磁导航控制。 以上仿真表明,在允许的偏差范围内,系统能
由于控制变量(B, F) 是六维的,要实现磁场的 够在预设路径上,按照设定参数与目标方向实现磁
T
完全控制,系统中至少需要六块电磁铁。 场的控制,即在仿真条件下能够实现磁体沿目标路
1.4 求解算法 径的导航。
在实际求解中,由于磁体尺寸远小于粘小管,
磁体的方向允许存在一定的偏差,而磁力F主要影
响磁体的运动速度,同样允许一定的偏差,因此,
为了避免出现奇异情况,对于目标的(B, F) 向量,
T
磁性材料
不进行精确求解,而是设定偏差向量,使用优化算 下一位置
法来获取容许偏差范围内的最优电流。 当前方向 目标方向
设优化后电流产生的磁感应强度与目标磁感应 磁性材料
强度的允许偏差角度为δ,磁力与目标磁力的允许偏
差向量为ε,电源输出最大电流为I max ,目标磁感应
强度为B 3×1 ,目标磁力为F 3×1 ,其余参数含义与前
文相同。采用如下算法求解各电磁铁电流I:
算法:电流最优化求解算法 图2 磁铁控制过程
输入:B 3×1 , F 3×1 , ε 3×1 , δ Fig.2 Magnet control process
输出: I 6×1
T
目标函数: min f = I I
第2步终点
约束:
arccos(M (1:3,:) CI·B) < δ
60°
F −ε < M (4:6,:) CI < F +ε 第1步终点
−I max < I i < I max 磁场方向
80°
算法中,目标函数设置为最小化电磁铁电流的 起始位置
磁性材料
平方和,即最小化电磁铁的总发热量,以在满足约
第17步终点
束条件的情况下,使各电磁铁电流大小较为均衡,
避免部分电磁铁电流过大而其余电磁铁电流过小的
情况。偏差角度δ与偏差向量ε可调,在实验中要根
据实际情况修改。
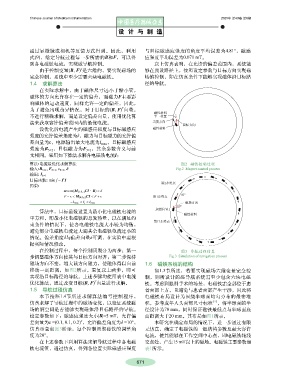
在控制过程中,每个控制周期分为两步:第一 图3 导航过程仿真
步调整磁体方向使其与目标方向对齐;第二步保持 Fig.3 Simulation of navigation process
磁场方向不变,增大该方向磁力,使磁体得以向前 1.6 磁铁系统的结构
移动一定距离,如图2所示。重复以上两步,即可 如1.3节所述,若要实现磁场六维变量完全控
实现沿目标路径的导航。上述步骤均使用表中电流 制,则所设计的磁导航系统需至少包含六块电磁
T
优化算法,通过改变目标(B, F) 向量进行求解。 铁。考虑到眼科手术的场景,电磁铁需全部位于患
1.5 导航过程仿真 者面部上方,且避免与患者面部产生干涉,因此将
本节按照1.4节所述求解算法编写控制程序, 电磁铁布局设计为围绕半球面均匀分布的最密堆
仿真求解了导航过程中的磁场变化,以验证系统磁 积,参考成年人头面部尺寸标准 ,将半球面的半
[18]
场的解空间是否能够实现磁体沿目标路径的导航。 径设计为70 mm,同时保证磁铁最低点与半球面底
设定参数如下:磁感应强度大小|B|=5 mT,允许偏 面距离大于20 mm。其布局如图1所示。
差向量为ε =(0.1, 0.1, 0.2) ,允许偏差角度为δ =10°, 本研究在确定布局的情况下,进一步通过有限
T
仿真示意如图3所示,每个控制周期磁铁的调整角 元仿真,确定了电磁铁的一组结构参数及最大容许
度为20°。 电流,使其能够在工作空间中心点,即电磁铁轴线
在上述参数下利用算法求解导航过程中各电磁 交点处,产生15 mT以上的磁场。电磁铁主要参数如
铁电流值,通过仿真,得到各位置实际磁感应强度 表1所示。
671