
Page 150 - 《中国电力》2026年第3期
P. 150
2026 年 第 59 卷
电网
DFIG
Chopper 第1层 短时间尺度
已知参数
故障穿越
机械参数 电气参数 电压阈值 电流限幅值
故
障
穿
越
RSC PWM PWM GSC 第2层 中时间尺度 响
故障穿越控制模式及参数 应
有功控制 PI参数 PI参数 故障穿越控制 无功支撑系数 主
V t 模式 模式 导
是 参
L m
ω slip 数
+ u s
I M x 2 √ s * i rd + L s + + dq abc v gd + * i gd V dc *
− PI + PI PI
I rq x 2 电流限幅 i rd − − − i gd + V dc − + 第3层 长时间尺度
ω slip σL r ω s L g
故障穿越电压阈值 V t ≤VL in ? 有功恢复斜率
* + RSC控制
PI
P s GSC控制
− 否 ω slip σL r ω s L g
P s i rq − + + + −
+ + i gq +
有功恢复斜率 PI abc dq PI
* i rd (稳态)
斜率限制 * i rq v gq + i gq *
* i rd (暂态) 环节 第4层 多时间尺度
有功外环PI参数 无功外环PI参数 P
无功支撑系数 V t ≤VL in ? U dpll Δω pll 锁相环 I
是 否 * U sabc abc + 参
无功优先 Q s + 1 θ pll 数
V t PI + PI s 电流内环PI参数 电压外环PI参数
− dq U qpll − U refq +
ω s
Q s
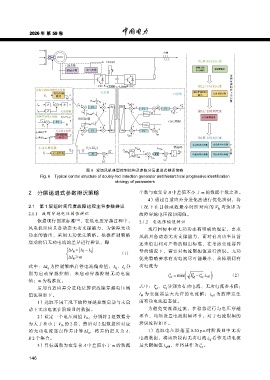
图 6 双馈风机典型控制结构及参数分层递进式辨识策略
Fig. 6 Typical control structure of doubly-fed induction generator and hierarchical progressive identification
strategy of parameters
2 分层递进式参数辨识策略 个数与在集合 B 中差值不小于 m 的数据个数之和。
4)通过自适应差分进化法进行优化辨识,各
2.1 第 1 层短时间尺度故障过程主导参数辨识 工况下在目标函数最小时所对应的 V 均值即为
h
t
2.1.1 故障穿越电压阈值辨识 故障穿越电压投切阈值。
依据现行国家标准 [33] ,在低电压穿越过程中, 2.1.2 电流限幅值辨识
风电机组应具备动态无功支撑能力,为保障无功 现行国标中对无功功率有明确的规定,要求
功率的输出,采用无功优先策略。根据控制策略 风机具备动态无功支撑能力,而对有功功率目前
启动前后无功电流的差异进行辨识,即 还未给出相对严格的输出标准,在考虑变流器容
∆I q = I Q − I q 量的情况下,需要对电流限幅值进行辨识。无功
(1)
∆I q ≥m 优先策略要求有功电流尽可能最小,故障期间有
式中:∆I 为控制策略启停电流偏差值;I 、I 分 功电流为
q
q
Q
( √ )
别 为 启 动 穿 越 控 制 、 未 启 动 穿 越 控 制 无 功 电 流 ∗ 2 ∗ (2)
i = min
rq
rd I −i ,i rd1
M
值;m 为精准度。
∗
∗
运用自适应差分进化法辨识故障穿越电压阈 式中: i 、 i 分别为有功电流、无功电流参考值;
rq
rd
M
值流程如下。 I 为变流器最大允许的电流值;i rd 1 为故障发生
1)选取不同工况下故障穿越控制启动与未启 前有功电流稳态值。
动下无功电流在阶段Ⅱ的数据。 为避免变流器过流,在稳态运行与电压穿越
2)设定一个电压阈值 V ,分别将 2 组数据分 环节,均须设置电流限幅环节。对于电流限幅的
th
为大于和小于 V 的 h 2 段,然后对 2 组数据所对应 辨识流程如下。
t
的无功电流逐点作差计算∆I ,将差值定义为 A、 1)选取电压跌落至 0.20 p.u.时阶段Ⅲ中无功
q
q
B 2 个集合。 电流数据,将该阶段内无功电流 i 看作无功电流
r
3)目标函数为在集合 A 中差值小于 m 的数据 最大限幅值 i rqM ,并将其作为 i 。
∗
rq
146