
Page 96 - 《振动工程学报》2026年第3期
P. 96
696 振 动 工 程 学 报 第 39 卷
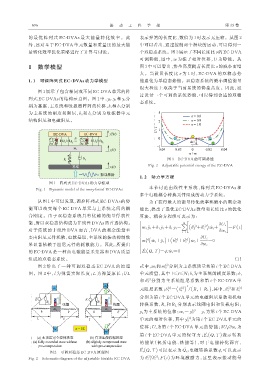
的 最 优 阵 列 式 EC⁃DVAs 最 大 能 量 转 化 效 率 。 此 表示弹簧的长度比,数值为 1 时表示无压缩。从图 2
外,还对基于 EC⁃DVA 单元数量和质量比的最大能 中可以看出,通过控制两个滑块的运动,可以得到一
量转化效率优化策略进行了计算与讨论。 个双稳态系统。图 3展示了不同长度比 σ的 EC⁃DVA
可调势能,图中,w 为振子相对位移,U 为势能。从
1 数学模型 图 3 中可以看出,势垒高度随着长度比 σ 的减小而增
大。当设置长度比 σ 为 1 时,EC⁃DVA 的双稳态势
1. 1 可调阵列式 EC‑DVAs 动力学模型 能退化为单稳态势能。双稳态系统的最小阈值能量
很大程度上取决于当前系统的势垒高度。因此,通
图 1 展示了包含相同或不同 EC⁃DVA 单元的阵
过设计一个可调的系统势能,可以得到合适的双稳
列式 EC⁃DVAs 的结构示意图。图 1 中,y 0 、y 1 和 y 2 分
态系统。
别为基座、主系统和吸振器阵列的位移,k 1 和 b 1 分别
为主系统的刚度和阻尼,b 2 和 b e 分别为吸振器单元
结构阻尼和电磁阻尼。
图 3 EC⁃DVA 的可调势能
Fig. 3 Adjustable potential energy of the EC⁃DVA
1. 2 动力学方程
图 1 阵列式 EC⁃DVAs 动力学模型
本节讨论由线性主系统、阵列式 EC⁃DVAs 和
Fig. 1 Dynamic model of the array⁃based EC⁃DVAs
多个电磁耦合转换元件组成的动力学系统。
从图 1 中可以发现,调控阵列式 EC⁃DVAs 的势 为了获得最大的能量转化效率和最小的剩余动
能可以改变每个 EC⁃DVA 单元与主系统之间的耦 能比,提出了最优 EC⁃DVAs 数量和长度比 σ 的优化
合刚度。由于双稳态系统具有优越的能量俘获性 算法。耦合方程组可表示为:
能,所以双稳态结构成为非线性 DVAs 的首选结构。 ì N é ù
ï ê ê ( ) i ( ) i ∂U i ú ú ú ú=F ( ) t
ï
对于传统的非线性 DVA 而言,DVA 的剩余能量主 ïm 1 y ̈ 1+b 1 y ̇ 1+k 1 y 1- ∑êê( b 2 +b e ) w ̇ i+ ∂w i û
i=1 ë
ï
要由阻尼元件耗散,也就是说,主系统的振动抑制效 ï ï ( ) i ) ( ) i ( ) i ∂U i
í
ï ï ( w ̈ i+y ̈ 1 +( b 2 +b e
果显著依赖于阻尼元件的耗散能力。因此,所提出 ï m 2 ) w ̇ i+ ∂w i =0
ï
ï
ï ̇
的 EC⁃DVA 是一种由电磁能量采集器和 DVA 质量 ï ï E i(Q,T )-ψ i w ̇ i=0
î
组成的双稳态系统。 (1)
( ) i
图 2 给 出 了 一 种 可 调 双 稳 态 EC⁃DVA 的 原 理 式中,m 1 和 m 2 分别为主系统质量和第 i 个 EC⁃DVA
图。图 2 中,l 为弹簧实际长度;L 为弹簧原长;l/L 单元质量,其中 1≤i≤N;k 1 为主系统的刚度系数;b 1
( ) i
和 b 2 分别为主系统阻尼系数和第 i 个 EC⁃DVA 单
( ) i ( ) i 2 ( ) i ( ) i
元阻尼系数;b e =( ) /( R c + R L),其中, b e 和 k e
k e
分别为第 i 个 EC⁃DVA 单元的电磁阻尼系数和机电
转换系数, R c 和 R L 分别表示线圈电阻和负载电阻;
( ) i
y 1 为主系统的位移; w i = y 2 - y 1 为第 i 个 EC⁃DVA
( ) i
单元的相对位移,其中 y 2 为第 i 个 EC⁃DVA 单元的
位移;U i 为第 i 个 EC⁃DVA 单元的势能; ∂U i ∂w i 为
第 i 个 EC⁃DVA 单元的保守力;E i(Q,T) 表示转换
̇
的 能 量(包 括 电 能 、热 能 等),对 于 电 能 转 化 而 言 ,
̇
̇
E i(Q,T) 可以表示为 Q i;电磁转换系数 ψ i 可以表示
图 2 可调双稳态 EC⁃DVA 原理图
( ) i
( ) i
Fig. 2 Schematic diagram of the adjustable bistable EC⁃DVA 为 b e k e ; F (t) 为环境激励力,这里表示振动能量