
Page 47 - 《振动工程学报》2026年第3期
P. 47
第 3 期 张海彬,等: 可编程 3D 打印的非对称双稳态压电振动能量采集器性能研究 647
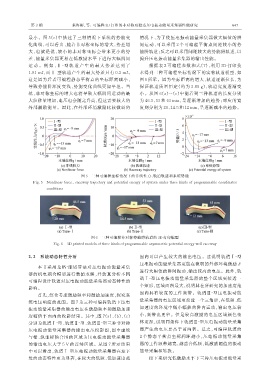
最小。图 5(c)中描述了三种情况下系统的势能变 情况下,为了使压电振动能量采集器做大幅值的阱
化曲线,可以看出,随着非对称坐标的增大,势差增 间运动,可以采用 2 个可编程平衡点间距较小的势
大,也就是说,较小的非对称坐标会带来更小的势 能阱轨道;反之可以采用间距较大的势能阱轨道,以
差,能量采集器更易在低激励水平下进行大幅阱间 提升压电振动能量采集器的输出性能。
运 动 。 例 如 ,Ⅱ ⁃型 轨 道 产 生 的 最 大 势 差 达 到 了 根据表 2 可编程参数和式(7),利用 3D 打印技
1.81 mJ,而Ⅰ⁃型轨道产生的最大势差只有 0.2 mJ。 术得到三种可编程坐标情况下的实物轨道模型,如
这是因为后者可编程静态平衡点的坐标距离减小, 图 6 所示。因为坐标距离的增大,轨道逐渐拉长,为
导致势能阱深度变浅,势能变化曲线更加平坦。当 保证轨道质量恒定(约为 3.89 g),轨道宽度逐渐变
然,非对称坐标的增大也将导致大幅阱间运动的最 小。从图 6(a)~(c)中能看到三种轨道的长度分别
大位移量增加,电压也会随之升高,但这需要较大的 为 46.5、 53 和 63 mm,呈逐渐增加的趋势;对应的宽
外部激励能量。因此,在外部环境激励比较微弱的 度则分别为 20、 14.5 和 12 mm,呈逐渐减小的趋势。
图 5 三种可编程坐标情况下的非线性力、轨道轨迹和系统势能
Fig. 5 Nonlinear force, raceway trajectory and potential energy of system under three kinds of programmable coordinates
conditions
图 6 三种可编程非对称势能阱轨道的 3D 打印模型
Fig. 6 3D printed models of three kinds of programmable asymmetric potential energy well raceway
2. 2 系统动态特性分析 围内可以产生较大的输出电压。这说明轨道Ⅰ⁃型
压电振动能量采集器更能在微弱的外部环境激励下
本节采用龙格⁃库塔算法对压电振动能量采集
进行大幅值的阱间振动,输出较高的电压。此外,轨
器的机电耦合模型进行数值求解,并仿真分析不同
道Ⅰ⁃型压电振动能量采集器的整个区域更接近一
可编程设计轨道对压电振动能量采集器动态特性的
个矩形,区域面积最大,说明其在所研究的加速度范
影响。
围内具有较宽的工作频带。轨道Ⅲ⁃型压电振动能
首先,综合考虑激励频率和激励加速度,探究系
量采集器的电压区域更接近一个三角形,在低频、低
统电压响应的范围。图 7 为三种可编程轨道下压电
振动能量采集器的输出电压在激励频率和激励加速 加速度的环境中做小幅值的阱内运动,输出电压较
度幅值平面内的投影结果。其中,图 7(a)、(b)、(c) 小,频带也更窄。但是较高激励的电压区域颜色整
分别为轨道Ⅰ⁃型、轨道Ⅱ⁃型、轨道Ⅲ⁃型三种非对称 体更深,说明同条件下轨道Ⅲ⁃型压电振动能量采集
压电振动能量采集器的输出电压投影图,图中虚线 器产生的电压要高于前两者。总之,可编程轨道的
与横、纵坐标轴合围的区域为压电振动能量采集器 2 个静态平衡点坐标间距越小,压电振动能量采集
的输出电压大于 5 V 的连续区域。从图 7 所示结果 器的工作频带越宽,越适合低频、低激励幅值的振动
中可以看出,轨道Ⅰ⁃型压电振动能量采集器在左下 能量采集和转换。
角的动态特性更为显著,在较大的低频、低加速度范 接下来研究低激励水平下三种压电振动能量采