
Page 171 - 《振动工程学报》2026年第3期
P. 171
第 3 期 孟祥恒,等: 自编码器在机械设备未知故障检测中的应用 771
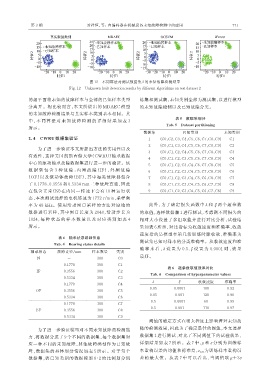
图 12 不同算法对测试数据集 2 的未知故障检测结果
Fig. 12 Unknown fault detection results by different algorithms on test dataset 2
的超平面将未知的故障样本与全部的已知样本类型 练集和测试集,未知类别全部为测试集,以进行模型
分离开。相比较而言,本文所提出的 MDAEC 模型 的未知故障检测以及已知故障分类。
的未知故障检测结果与真实样本类别基本相同。其
表 5 数据集划分
中 ,不 同 算 法 对 未 知 故 障 检 测 的 详 细 结 果 如 表 3
Tab. 5 Dataset partitioning
所示。
数据集 已知类别 未知类别
2. 4 CWRU 数据集验证 1 (C0,C2,C3,C4,C5,C6,C7,C8,C9) C1
2 (C0,C1,C3,C4,C5,C6,C7,C8,C9) C2
为了进一步验证本文所提出方法的实用性以及
3 (C0,C1,C2,C4,C5,C6,C7,C8,C9) C3
有效性,选择美国凯斯西储大学(CWRU)轴承数据
4 (C0,C1,C2,C3,C5,C6,C7,C8,C9) C4
中心的滚动轴承故障数据集进行进一步的验证。该
5 (C0,C1,C2,C3,C4,C6,C7,C8,C9) C5
数 据 集 包 含 3 种 故 障 :内 圈 故 障(IF)、外 圈 故 障 6 (C0,C1,C2,C3,C4,C5,C7,C8,C9) C6
(OF)以及滚动体故障(BF),其中每类故障都包含 7 (C0,C1,C2,C3,C4,C5,C6,C8,C9) C7
了 0.1778、0.3556 和 0.5334 mm 三种故障直径,因此 8 (C0,C1,C2,C3,C4,C5,C6,C7,C9) C8
在包含正常(N)在内同一转速下会有 10 种运行状 9 (C0,C1,C2,C3,C4,C5,C6,C7,C8) C9
态,本次测试选择的电机转速为 1772 r/min,采样频
率为 48 kHz。使用滑动窗口采样的方法对原始的 此外,为了确定损失函数中 λ 和 ξ 两个超参数
数据进行采样,其中窗口长度为 2048,滑动步长为 的取值,选择数据集 1 进行测试,考虑到不同损失的
1024,每 种 状 态 的 样 本 数 量 以 及 对 应 类 别 如 表 4 相对大小设置了多组取值并进行对比分析,试验结
所示。 果如表 6 所示,对比指标为收敛速度和准确率,收敛
速度指的是模型在第几轮训练时隙收敛,准确率为
表 4 轴承状态详细信息
Tab. 4 Bearing status details 测试集已知时样本的分类准确率。从收敛速度和准
确 率 来 看 , λ 设 置 为 0.5、 ξ 设 置 为 0.0001 时 ,效 果
轴承状态 故障直径/mm 样本数量 类别
最好。
N − 300 C0
0.1778 300 C1
表 6 超参数取值效果对比
IF 0.3556 300 C2
Tab. 6 Comparison of hyperparameter values
0.5334 300 C3
λ ξ 收敛速度 准确率
0.1778 300 C4
0.05 0.0001 100 0.92
OF 0.3556 300 C5
0.05 0.001 120 0.90
0.5334 300 C6
0.5 0.0001 60 0.99
0.1778 300 C7
0.5 0.001 110 0.97
BF 0.3556 300 C8
0.5334 300 C9
阈值的确定方式在很大程度上影响着对未知故
为了进一步验证模型对不同未知故障的检测能 障的检测效果,因此为了确定最佳的阈值,本文选择
力,将数据分成了 9 个不同的数据集,每个数据集对 数据集 1 进行测试,对比了不同阈值下的试验效果,
应一种不同的未知故障,其他故障类型作为已知故 详细结果如表 7 所示。表 7 中, μ 和 σ 分别为训练样
障,数据集的具体划分情况如表 5 所示。对于每个 本重构误差的均值和标准差,e max 为训练样本重构误
数据集,将已知类别的数据按照 8∶2 的比例划分训 差的最大值。从表 7 中可以看出,当阈值取 μ+3σ