
Page 166 - 《振动工程学报》2026年第3期
P. 166
766 振 动 工 程 学 报 第 39 卷
f 的计算公式为:
e i = ∑ ( x ̂ i,j - x i,j ) 2 (5)
j = 1 T k = μ k + 3σ k (6)
式中, x i,j 与 x ̂ i,j 分别表示第 i 个训练样本的第 j 个特 式中, μ k 和 σ k 分别为重构误差 E k 的均值和标准差。
征与重构样本的第 j 个特征; f 表示单个训练样本的 当样本的重构误差小于 T k 时,输入样本与第 k 组数
特征总数。 据属于同一类别,反之为其他类别。
按照式(5)可以计算出第 k 组全部样本的重构
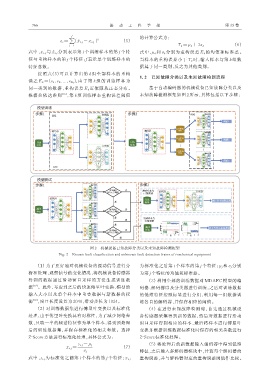
1. 2 已知故障分类以及未知故障检测流程
),由于第 k 组的训练样本为
误差 E k =( e 1,e 2,...,e N k
同一类别的数据,重构误差 E k 近似服从正态分布。 基于自动编码器的机械设备已知故障分类以及
根据拉依达准则 [16] ,第 k 组训练样本重构误差阈值 未知故障检测框架如图 2 所示,具体包括以下步骤:
图 2 机械设备已知故障分类以及未知故障检测框架
Fig. 2 Known fault classification and unknown fault detection frame of mechanical equipment
(1) 为了更好地对机械设备的振动信号进行分 为标准化之后第 i 个样本的第 j 个特征; μ j 和 σ j 分别
析和处理,观察信号的变化情况,将机械设备传感器 为第 j 个特征的均值和标准差。
得到的数据通过滑动窗口采样的方法生成训练数 (3) 利用全部的训练数据对 MDAEC 模型的编
据 [17] 。此外,考虑到之后的快速傅里叶变换、模型的 码器、解码器以及分类器进行训练,之后对训练数据
输入大小以及单个样本中重叠数据与新数据的权 的低维特征按照标签进行分组,利用每一组数据训
衡 [18] ,窗口长度设置为 2048,滑动步长为 1024。 练各自的解码器,并保存相应的阈值。
(2) 对训练数据集进行傅里叶变换以及标准化 (4) 在进行未知故障检测时,首先通过机械设
处理,由于傅里叶变换具有对称性,为了减少网络参 备传感器采集得到新的数据,然后对数据进行滑动
数,只取一半的频谱特征作为单个样本,得到预处理 窗口采样得到相应的样本,最后将样本进行傅里叶
后的训练数据集,并保存标准化的相关参数。选择 变换并根据训练数据标准化时保存的相关参数进行
Z⁃Score 方法进行标准化处理,具体公式为: Z⁃Score 标准化处理。
s i,j - μ j (5) 将处理后的新数据输入编码器中得到低维
x i,j = (7)
σ j 特征,之后输入多解码器模块中,计算每个解码器的
重构误差,并与解码器对应的重构误差阈值作比较。
式中, s i,j 为标准化之前第 i 个样本的第 j 个特征; x i,j