
Page 210 - 《振动工程学报》2026年第2期
P. 210
526 振 动 工 程 学 报 第 39 卷
宽 带 控 制 子 模 型 的 控 制 信 号 矢 量 y b (n) = [y b1 , 式(5)中, y u 代表宽窄带混合噪声自适应滤波模
y b2 ,··· , y bM ] 由参考信号矢量 x(n)通过前馈控制滤波 型总的扬声器驱动信号,表示为宽带混合控制子模
T
器矩阵 w b 滤波得到,表示为: 型和窄带控制子模型的控制信号矢量之和:
y b (n) = w b x(n)
y u = y b +y n (11)
T
w b = [w b1 ,w b2 ,··· ,w bM ]
式 中, y b 为 宽 带 混 合 控 制 子 模 型 的 控 制 信 号 矢 量 ;
[ ] T
w bm = w T ,w T ,··· ,w T (7)
bm1 bm2 bmK y n 为窄带子模型的控制信号矢量。
式中, w bmk 表示第 k 个参考信号和第 m 个扬声器之间
的控制滤波器,由 I 阶的 FIR 滤波器构建。 1.2 混合噪声多目标优化控制方法
控制滤波器矩阵 w b 采取自适应 FxLMS 算法进行
在宽窄带混合自适应滤波模型的基础上,为了满
更新,可以表示为:
足乘客对声音设计的需求,保证经控制后的残余车
ˆ T
w b (n+1) = w b (n)−α b R (n)e(n) (8)
ˆ
式中, α b 为前馈控制结构的步长; R为经 G v 的对象模 内噪声具有良好的声学特征,需要按照既定的幅值
ˆ
型 G v 滤波的参考信号矩阵,具体表示为: 要求,对各个窄带分量 [19] 进行特定的衰减或增益。
T T T 据此,本文提出了混合噪声多目标优化控制方法,来
r (n) r (n−1) ··· r (n− J −1)
1
1
1
r (n) r (n−1) ··· r (n− J −1) 对车内宽窄带混合噪声进行进一步的控制,整个控
T T T
2 2 2
R= . . . . . (9)
ˆ
.
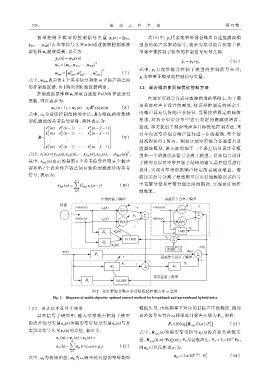
. . . 制流程如图 2 所示。相较于宽窄带混合多通道自适
T T T
r (n) r (n−1) ··· r (n− J −1) 应滤波模型,该方法增加了一个误差信号设计子模
L
L
L
T
式中, r l (n)=[r l11 (n), r l12 (n),···,r l1K (n), r l21 (n),···,r lMK (n)] , 型和一个谐波误差信号分离子模型。误差信号设计
其中, r lmk (n)表示的是第 k 个参考信号经第 m 个扬声 子模型可以对窄带控制子结构的输入误差信号进行
器和第 l 个误差传声器之间对象模型滤波后的参考 设计,实现对窄带阶次噪声特定的衰减或增益。谐
信号,表示为: 波误差信号分离子模型则可以更好地解除误差信号
J−1
∑
r lmk (n) = ˆ G lmj x k (n− j) (10) 中宽带分量和窄带分量之间的耦合,实现更好的控
j=0 制效果。
窄带控制子模型 误差信号分离子模型
转速 …
…
cos(ω i n) x ai (n) … + cos(ω i n) … +
α i (n) c i (n) −
∑ ∑
y n
sin(ω i n) x bi (n) sin(ω i n) −
b i (n) + … d i (n) …
…
′
x ai (n) … LMS e b
G v
e n +
FxLMS ∑
G v ′ −
x bi (n) e(n)
期望信号
x (n) d(n) ∑
P v
+ 误差信号设计子模型
+
y b + ∑ y u
w b G v
宽带控制子模型
FxLMS
G v
图 2 宽窄带混合噪声多目标优化控制方法示意图
Fig. 2 Diagram of multi-objective optimal control method for broadband and narrowband hybrid noise
1.2.1 误差信号设计子模型 幅值矢量,由该频率下对应的目标声压级确定,假设
误差信号子模型中,输入窄带噪声控制子模型 误差信号矢量在 ω i 频率处目标声压级为 P L ,则有:
的误差信号矢量 e n (n)为期望窄带信号矢量 e p (n)与真 ( 2 ) (13)
P L =10log R e p e p (0,n)/P 0
实误差信号矢量 e v (n)的差值,表示为: 式中, R e p e p (n)为期望窄带信号 e p (n)的自相关函数矢
e n (n) = e v (n)−e p (n) =
量, (0,n)=E(e (n)) P 0 为基准声压, P 0 = 2×10 Pa。
;
2
−5
N ∑ R e p e p p
e v (n)− a pi sin(ω i n+φ 0 ) (12) 则 a pi 可以反推表示为:
i=1
式中, φ 0 为初始相位; a pi 为 ω i 频率处对应的窄带期望 a pi = 2×10 0.1P L · P 2 0 (14)