
Page 212 - 《振动工程学报》2026年第2期
P. 212
528 振 动 工 程 学 报 第 39 卷
70 2 ∑
原始噪声
60 传统控制模型 x N (n) = i=1 A i sin(ω i (n)·n) =
宽窄带混合自适应滤波模型
声压级 / dBA 40 i=1 A i sin 2π· w 0 n n r (τ) ·i/ f s ·dτ ) (20)
50
(
2 ∑
30
30
20
10 式中,阶次噪声幅值 A i 与之前保持一致; n r (n)为时变
函数,代表每个采样点对应的发动机转速。
0
30 100 200 300 400 500
频率 / Hz 同理,设定仿真中对应于发动机阶次频率的目标
(a) 宽窄带混合多通道自适应滤波模型的控制性能图 电压恒定为 C 1 = 0.005 V,C 2 = 0.04 V,期望信号表示为:
(a) Diagram of the control performance for broadband and
( )
narrowband hybrid multi-channel adaptive filtering model 2 ∑ w n n r (τ)
x E (n) = C i sin 2π· ·i/f s ·dτ (21)
70 i=1 0 30
原始噪声
60 传统控制模型 本仿真的时间总长为 10 s,由于匀加速的起步工
混合噪声多目标优化控制方法
50
幅值 / dBA 40 况下,振动信号的初始值为零,为方便仿真计算,使
表征路噪的随机振动电压信号幅值同样随时间线性
30
20
10 增加,同时初级通道和次级通道的传递函数与之前
稳态工况仿真测试保持一致。
0
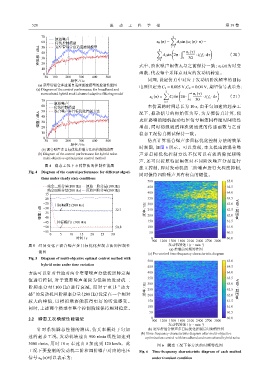
30 100 200 300 400 500 仿真计算混合噪声多目标优化控制方法的效果
频率 / Hz
(b) 混合噪声多目标优化控制方法的控制性能图 时频图,如图 6 所示。可以发现,本文提出的混合噪
(b) Diagram of the control performance for hybrid noise 声多目标优化控制方法不仅可以有效消除宽频噪
multi-objective optimization control method
声,还可以按照特定幅值对不同阶次噪声分量进行
图 4 稳态工况下不同算法的控制性能图
独立控制,即对发动机的二阶噪声进行大程度抑制,
Fig. 4 Diagram of the control performance for different algori-
同时保持四阶噪声具有较高的幅值。
thms under steady state conditions
500 65.0
原始二阶分量(100 Hz)
残余二阶分量(100 Hz) 450 64.5
残余四阶分量(200 Hz) 原始四阶分量(200 Hz)
−15 400 64.0
−20 350 63.5
−25 目标幅值2 (200 Hz) 300 63.0
−30
幅值 / dB −35 −32.7 频率 / Hz 250 62.5 声压级 / dBA
62.0
200
−40
−45 目标幅值1 (100 Hz) 150 61.5
−50 −50.8 100 61.0
−55 50 60.5
0 5 10 15 20 25 30
时间 / s 0 60.0
900 1200 1500 1800 2100 2400 2700 3000
−1
图 5 时间变化下混合噪声多目标优化控制方法的控制性 发动机转速 / (r·min )
(a) 控制前时频特性图
能图
(a) Pre-control time-frequency characteristic diagram
Fig. 5 Diagram of multi-objective optimal control method with
500 65.0
hybrid noise under time variation
450 64.5
方法可以针对性地对两个窄带噪声分量按照特定幅 400 64.0
值进行控制,对于宽带噪声和较为低频的发动机二 350 63.5
阶频率分量(100 Hz)进行衰减,而对于更具“动力 频率 / Hz 300 63.0 声压级 / dBA
62.5
250
感”的发动机四阶频率分量(200 Hz)设定在一个相对 200 62.0
较大的峰值,以模拟乘客能获得更好的听觉感受。 150 61.5
同时,上述两个模型在整个控制阶段保持相对稳定。 100 61.0
50 60.5
2.2 瞬态工况模型性能验证 0 900 1200 1500 1800 2100 2400 2700 3000 60.0
−1
发动机转速 / (r·min )
针对系统瞬态性能的测试,仿真车辆处于匀加 (b) 宽窄带混合噪声多目标优化控制后时频特性图
(b) Time-frequency characteristic diagram after multi-objective
速的起步工况,发动机转速由 900 r/min 线性加速到 optimization control with broadband and narrowband hybrid noise
3000 r/min,用时 10 s;车速由 0 加速到 120 km/h。此 图 6 瞬态工况下各方法的时频特性图
工况下要控制的发动机二阶和四阶噪声对应的电压 Fig. 6 Time-frequency characteristic diagram of each method
信号 x N (n)可以表示为: under transient condition