
Page 202 - 《振动工程学报》2026年第2期
P. 202
518 振 动 工 程 学 报 第 39 卷
y 力 相 位 和 结 构 振 动 速 度 相 位 反 向, 初 始 角 位 置
θ=1.5π。求解式 (5) 可得到:
f r f t f t f r
y(t) = y 0 cos(ω n t) (8)
θ(t) θ(t)
m t m t
2 r r 2 SD-TRA 的能耗需求功率为:
1 2
2
Y P S =2M ˙ θ = 2· m s ry 0 ω [cos(ω n t)] · ˙ θ =
n
2
3
m −m s ry 0 ω [cos(ω n t)] 2 (9)
n
O X
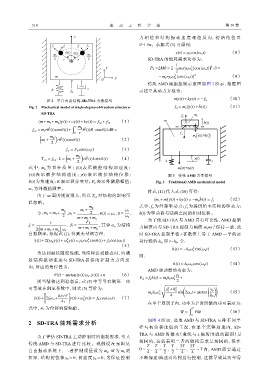
传统 AMD 减振控制示意图如图 3 所示,根据图
k c 示建立其动力方程为:
f w
(10)
图 2 单自由度结构-SD-TRA 力学模型 m¨y(t)+ky(t) = −f q
¨
Fig. 2 Mechanical model of single-degree-of-freedom structure- f q = m s (¨y(t)+h(t)) (11)
SD-TRA
m s
f q
(1) m
(m+m t +m g )¨y(t)+c˙y(t)+ky(t) = f r,y + f w h(t)
w
r m g
2
2
f r,y = m t r ˙ θ (t)cosθ(t)+ ˙ θ (t)R·cosθ(t)dR =
0 r f q
( )
m s y(t)+h(t)
m g
2
m t + r ˙ θ (t)cosθ(t) (2)
2
f w = F 0 cos(ω 1 t) (3)
( )
m g 2
T r,x = f r,x · L = m t + r ˙ θ (t)Lsinθ(t) (4) y(t)
2 k c
式 中, m g 为 直 杆 质 量 ; ¨ y(t)表 示 被 控 结 构 加 速 度 ; my(t)+ky(t)
˙ y(t)表 示 被 控 结 构 速 度 ; y(t) 表 示 被 控 结 构 位 移 ; 图 3 传统 AMD 力学模型
˙ θ(t)为角速度;R 表示积分变量;F 0 表示外激励幅值; Fig. 3 Traditional AMD mechanical model
ω 1 为外激励频率。
将式 (11) 代入式 (10) 可得:
由于 xz 面的刚度很大,所以 T r, 对结构的影响可
x
¨ (12)
以忽略。 (m s +m) ¨y(t)+ky(t) = −m s h(t) = f a
式中,f q 为外部驱动力;f a 为提供给主结构的驱动力;
m g
m t +
m g ω 1
令: m s = m t + , µ s = 2 , ˙ θ(t) = ω 1 , η = , h(t) 为驱动器与结构之间的相对位移。
2 ω n
m+m t +m g 为了使 与 控制
c F 0 SD-TRA AMD 具有可比性,AMD
2
ξ = ( ) , f 0 = ,其中 ω n 为结构 力幅值应与 SD-TRA 控制力幅值 m s rω 1 保持一致,此
m+m t +m g
2 m+m t +m g ω n
自振频率,根据式 (1),得到无量纲方程: 时 SD-TRA 控制半径 r 在数值上等于 AMD 一半的运
2
2
¨ y(t)+2ξω n ˙y(t)+ω y(t) = µ s rω cosθ(t)+ f 0 cos(ω 1 t) 动行程的 h 0 , 即 r=h 0 ,令:
n 1
(5)
¨
2
h(t) = −h 0 ω sin(ω n t) (13)
n
为达到最优阻尼性能,当结构达到稳态时,应满
则:
足 结 构 振 动 速 度与 SD-TRA 提 供 的 控 制 力 方 向 反
˙
h(t) = h 0 ω n cos(ω n t) (14)
向,对应的角位置为:
AMD 驱动器的功率为:
θ(t) = arctan(y(t)ω n , ˙y(t))+π (6) 3 y 0
˙
P A =f q h(t) = m s h 0 ω +
则当结构达到稳态后,式 (5) 中等号右侧第一项 n 2
√
可等效在阻尼系数中,则式 (5) 等价为: y +h 2 ( ( ))
2
m s h 0 ω 3 0 0 sin 2ω n t +arctan y 0 (15)
[ ] n
µ s ω 1 r 2 4 h 0
¨ y(t)+ 2ξω n + ˙ y(t)+ω y(t) = f 0 cos(ω 1 t) (7)
n
在单个周期 T 内,功率为 P 时所做的功可表示为:
A T
式中,A T 为位移响应幅值。 w T
W = Pdt (16)
0
2 SD-TRA 能 耗 需 求 分 析 如图 4 所示,选取 AMD 与 SD-TRA 五种不同半
径 与 初 位 移 比 值 的 工 况, 在 单 个 完 整 周 期 内 , SD-
TRA 与 AMD 所做功(曲线与 x 轴所围成的面积)是
为了评估 SD-TRA 主动控制时的能耗需求,引入
相同的,这就表明二者的能耗需求是相同的,但在
传统 AMD 与 SD-TRA 进行比较。现假设在无阻尼
T T T T 3T 3T
自由振动系统下,二者控制质量设为 m s ,M 为 m s 的 0 ∼ 4 、 4 ∼ 2 、 2 ∼ 4 、 4 ∼ T 内,AMD 需要通过
扭矩,结构初位移 y 0 > 0,初速度 ˙ y 0 = 0,为保证控制 不断加速/减速对结构进行控制,这就导致其功率需