
Page 204 - 《振动工程学报》2026年第2期
P. 204
520 振 动 工 程 学 报 第 39 卷
A 0 ω 2 12 无控
A = n (27)
TMD
f 0 SD-TRA
式中,A 为 TMD 无量纲化相对位移幅值;A 0 为相对 8
位移幅值 A 中的最大值。 动力放大系数β 10 6
为 了 保证 TMD 与 SD-TRA 的 可 比 性 , 根 据 图 7 4
所示流程,将图 8 工况下的相对位移幅值 A 的最大 2
值 A 0 等效为 SD-TRA 中的控制半径 r,图中 μ 表示质 0
0.8 1.0 1.2
量比。图 8 表明,A 0 随着质量比的增大而减小,通过 频率比η
设计 SD-TRA 与 TMD 的质量比相同,根据图 7 流程
图 9 工况 2 最优控制时的频响曲线
计算出等效系数 S,从而保证 TMD 与 SD-TRA 有相 Fig. 9 Frequency response curves under case 2 optimal control
同的尺寸和控制质量。
ξ、μ 1 已知 80
90
相对位移幅值最大值A 0 60
计算κ opt 、ξ opt 70
2 ω n r 50
2
A 0 ω n
根据max = 40
f 0 f 0
30
0.010 0.012 0.014 0.016 0.018 0.020
质量比μ
计算等效μ s , 计算等效系数S
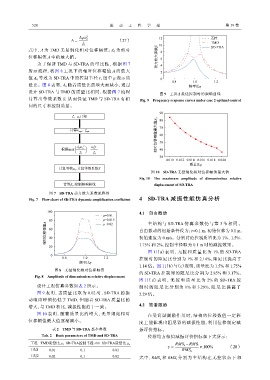
图 10 SD-TRA 无量纲化相对位移幅值最大值
Fig. 10 The maximum amplitude of dimensionless relative
计算β t , 绘制频响曲线 displacement of SD-TRA
图 7 SD-TRA 动力放大系数流程图
Fig. 7 Flow chart of SD-TRA dynamic amplification coefficient 4 SD-TRA 减 振 性 能 仿 真 分 析
100 4.1 自由振动
μ=0.01 主 结 构与 仿 真 参 数 仍 与 第 节 相 同 。
μ=0.015
相对位移幅值A 80 μ=0.02 自由振动的初始条件设为:r=0.1 m,初始位移为 0.1 m,
SD-TRA
3
60
初始速度为
1%、1.5%、
0 m/s。分别讨论控制质量比为
40
20 1.75% 和 2%,控制半径取为 0.1 m 时的减振效果。
图 11( a) 表 明 , 无 控 和 质 量 比 为 1% 的 SD-TRA
0
0.8 1.0 1.2 控制时的阻尼比分别为 1% 和 2.14%,阻尼比提高了
频率比η
1.14 1.5% 1.75%
倍。图 11(b)与(c)表明,质量比为 和
图 8 无量纲化相对位移幅值
的 SD-TRA 控制时的阻尼比分别为 2.85% 和 3.17%。
Fig. 8 Amplitude of dimensionless relative displacement
图 11( d) 表 明 , 无 控 和 质 量 比 为 2% 的 SD-TRA 控
设计工况仿真参数如表 2 所示。 制 时 的 阻 尼 比 分 别为 1% 和 3.29%, 阻 尼 比 提 高 了
图 9 表明,当质量比取为 0.02 时,SD-TRA 的振 2.29 倍。
动响应峰值仍低于 TMD,但随着 SD-TRA 质量比的
增大,与 TMD 相比,减振性能趋于一致。 4.2 简谐激励
图 10 表明,随着质量比的增大,无量纲化相对 在受简谐激励作用时,结构的位移数值一定程
位移幅值最大值逐渐减小。 度上能体现出阻尼器的减振性能,利用位移制定减
表 2 TMD 与 SD-TRA 基本参数 振评价指标。
Tab. 2 Basic parameters of TMD and SD-TRA 位移均方根值减振评价指标如下式所示:
工况 TMD质量比 μ 1 SD-TRA控制半径 r/m SD-TRA质量比 μ s RMS u −RMS t
γ = ×100% (28)
工况1 0.01 0.1 0.01 RMS u
工况2 0.02 0.1 0.02 式中,RMS u 和 RMS t 分别为主结构在无控状态下和