
Page 119 - 《振动工程学报》2025年第8期
P. 119
第 8 期 郭 彪,等: 基于神经常微分方程的机械故障诊断方法 1759
表 3 残差网络模型超参数选择 微分方程的形式改进了神经网络各层之间的传递方
Tab. 3 Hyperparameters selection for ResNet model 式(t 在此过程中不是时间,而是节点网络的深度,
超参数 取值 f ( x t,t )表示任意一点处的梯度)。之后将隐藏状态
Epochs 160
输入到前馈层,通过前馈网络的展平层和线性层,最
Train_Batch_size 64
Test_Batch_size 128 后以七种分类标签的形式输出。表 4 展示了 NODE
Optimizer_SGD_ momentum 0.9 架 构 的 基 本 布 局 以 及 每 一 层 输 出 张 量 的 大 小 。
Learning rate 0.1
NODE 模型的超参数选择如表 5 所示。
Amount of ResBlock(n) 6
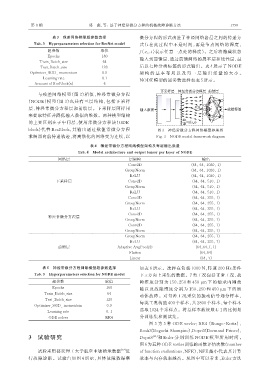
与残差网络模型(图 2)相似,神经常微分方程
(NODE)模型(图 3)也共有三层结构,包括下采样
层、神经常微分方程层和前馈层。下采样层同样用
来提取特征并降低输入数据的维数。两种模型结构
的主要区别在于中间层,使用常微分方程块(ODE‑
block)代替 ResBlock,其输出通过数值常微分方程 图 3 神经常微分方程网络模型框架图
求解器向前传递轨迹,将离散化的网络变为连续,以 Fig. 3 NODE model framework diagram
表 4 神经常微分方程网络模型架构及每层输出张量
Tab. 4 Model architecture and output tensor per layer of NODE
网络层 层架构 输出
Conv2D (64, 64, 1020, 1)
GroupNorm (64, 64, 1020, 1)
ReLU (64, 64, 1020, 1)
下采样层 Conv2D (64, 64, 510, 1)
GroupNorm (64, 64, 510, 1)
ReLU (64, 64, 510, 1)
Conv2D (64, 64, 255, 1)
GroupNorm (64, 64, 255, 1)
ReLU (64, 64, 255, 1)
Conv2D (64, 64, 255, 1)
神经常微分方程层
GroupNorm (64, 64, 255, 1)
Conv2D (64, 64, 255, 1)
GroupNorm (64, 64, 255, 1)
GroupNorm (64, 64, 255, 1)
ReLU (64, 64, 255, 1)
前馈层 Adaptive AvgPool2D (64,64,1,1)
Flatten (64,64)
Linear (64, 7)
表 5 神经常微分方程网络模型超参数选择 如表 6 所示。选择在负载 1000 N,转速 200 Hz 条件
Tab. 5 Hyperparameters selection for NODE model 下 x 方向上采集的数据。7 类工况包括正常工况,故
超参数 取值 障维度分别为 150、250 和 450 μm 下的轴承内圈故
Epochs 160 障以及故障维度分别为 150、250 和 450 μm 下的滚
Train_Batch_size 64
动体故障。对每种工况采集的振动信号划分样本,
Test_Batch_size 128
每类工况构造 400 个样本,共 2800 个样本,每个样本
Optimizer_SGD_ momentum 0.9
选取 1024 个采样点。将总样本数按照 4∶1 的比例划
Learning rate 0. 1
ODE solver RK4 分训练集和测试集。
图 5 为 5 种 ODE sovler:RK4 (Runge‑Kutta),
Bosh3(Bogacki‑Shampine),Dopri5(Dormand‑Prince),
3 试验研究 Dopri8 [18] 和 Euler 分 别 训 练 NODE 模 型 所 用 时 间 。
图 6为五种 ODE sovler训练的函数评估次数(number
试验采用都灵理工大学航空主轴轴承数据 [17] 进 of function evaluations,NFE),NFE 越小代表其计算
行故障诊断。试验台如图 4 所示,具体故障数据集 效率与内存效率越高。从图中可以看出,Euler 方法