
Page 131 - 卫星导航2021年第1-2合期
P. 131
Xia et al. Satell Navig (2021) 2:8 Page 17 of 19
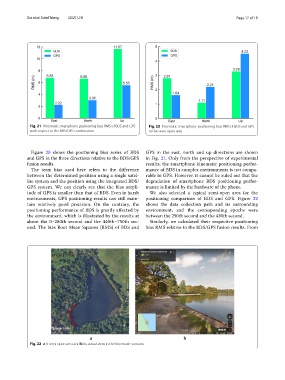
Fig. 21 Kinematic smartphone positioning bias RMS of BDS and GPS Fig. 23 Kinematic smartphone positioning bias RMS of BDS and GPS
with respect to the BDS/GPS combination in the semi-open area
Figure 20 shows the positioning bias series of BDS GPS in the east, north and up directions are shown
and GPS in the three directions relative to the BDS/GPS in Fig. 21. Only from the perspective of experimental
fusion results. results, the smartphone kinematic positioning perfor-
The term bias used here refers to the difference mance of BDS in complex environments is not compa-
between the determined position using a single satel- rable to GPS. However, it cannot be ruled out that the
lite system and the position using the integrated BDS/ degradation of smartphone BDS positioning perfor-
GPS system. We can clearly see that the bias ampli- mance is limited by the hardware of the phone.
tude of GPS is smaller than that of BDS. Even in harsh We also selected a typical semi-open area for the
environments, GPS positioning results can still main- positioning comparison of BDS and GPS. Figure 22
tain relatively good precision. On the contrary, the shows the data collection path and its surrounding
positioning performance of BDS is greatly affected by environment, and the corresponding epochs were
the environment, which is illustrated by the results at between the 290th second and the 430th second.
about the 0–280th second and the 440th–750th sec- Similarly, we calculated their respective positioning
ond. The bias Root Mean Squares (RMS) of BDS and bias RMS relative to the BDS/GPS fusion results. From
Fig. 22 a A semi-open area and b its actual view in the kinematic scenario