
Page 70 - 《武汉大学学报(信息科学版)》2025年第10期
P. 70
第 50 卷第 10 期 李 一等:一种顾及 DOP 值的 ARAIM 风险优化分配方法 2005
由图 1 可知,最大和最小 DOP 值子集的故障 2.2.2 连续性风险优化分配
检验统计量均可反映定位误差的变化,但两者检 对于最小 DOP 值子集而言,其所隔离卫星对
验统计量的波动程度及其与阈值的关系存在差 定位贡献较小,同时考虑到复杂场景不可避免地
异:相较最小 DOP 值子集,最大 DOP 值子集的检 存在各种信号异常,故障检验统计量可能频繁大
验统计量波动剧烈,但未检测出故障,即该子集 于阈值,进而导致连续性能力的缺失。本文基于
所隔离的卫星对定位贡献较大,且面临较大的漏 “避免定位贡献大对应卫星的漏警风险”原则,即
警风险。因此,在风险分配环节,最大 DOP 值子 假设 DOP 值越大的子集面临较大的连续性风险,
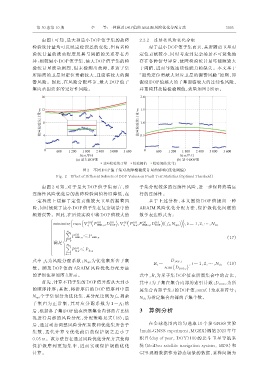
集应承担更多的完好性风险。 并重构其故障检验阈值,效果如图 2 所示。
图 2 不同 DOP 值子集对故障检验统计量的影响(优化阈值)
Fig. 2 Effect of Different Subsets of DOP Values on Fault Test Statistics (Optimal Threshold)
由图 2 可知,对于最大 DOP 值子集而言,经 子集分配较多的连续性风险,进一步保障终端运
连续性风险优化后的故障检验阈值得以降低,在 行的连续性。
一定程度上缓解了定位贡献较大卫星的漏警风 基 于 上 述 分 析 ,本 文 围 绕 DOP 值 提 出 一 种
险,同时规避了最小 DOP 值子集在复杂场景中的 ARAIM 风险优化分配方法,保护级优化问题的
频繁误警。因此,在后续实验中将 DOP 值较大的 数学表达形式为:
ì ( 0 ) ( 0 ) ( 0 ) ) ( k ) ( k ) ( k ) ( k ) ) } )
ï
ï ï minimize{ max( V q ( P HMI,q,D DOP ,V q ( P fa,q,P HMI,q,D DOP |( f k,N opt ) ,k = 1,2,…,N set
ï
ï ì N set
ï
ï ï ï ï ( k )
ï∑
í P HMI,q ≤ P HMI,q (17)
ï ï ï k = 0
ï ï 满足 í
ï ï ï ï N set
ï ï ï P fa,q ≤ P fa,q
ï∑
( k )
ï ï ï ï
î
î k = 1
式中, f k 为风险分配系数; N opt 为优化集所含子集 D DOP,i
R i = , i = 1,2,…,N ele (18)
数。顾及 DOP 值的 ARAIM 风险优化分配方法 sum( D DOP,i )
的详细流程如图 3 所示。 式中, R i 为某子集 DOP 值在所属集合中的占比,
首先,计算不同子集的 DOP 值并按从大到小 其中 i 为子集在集合内部的索引计数; D DOP,i 为所
的顺序排序;其次,将排序后的 DOP 值序列中前 属集合内部子集 i 的 DOP 值;sum( )为求和符号;
N opt 个子集划分为优化集,其分配比例为 f k,剩余 N ele 为指定集合内部的子集个数。
子 集 归 为 正 常 集 ,其 对 应 分 配 系 数 为 1 - f k;然
后,根据各子集 DOP 值在所属集合内部的占比情 3 算例分析
况进行局部的风险分配,分配策略见式(18);最
后,通过动态调整风险分配系数和优化集所含子 在全球范围内均匀选取 10 个多 GNSS 实验
集 数 ,迭 代 计 算 至 优 化 前 后 的 保 护 级 之 差 小 于 (multi-GNSS experiment,MGEX)测站 2023 年年
0.05 m。该方法旨在通过风险优化分配方式使得 积日(day of year, DOY)100 的北斗卫星导航系
保 护 级 序 列 更 加 集 中 ,进 而 实 现 保 护 级 的 优 化 统(BeiDou satellite navigation system, BDS)和
计算。 GPS 观测数据作为静态场景的数据,采样间隔为