
Page 69 - 《武汉大学学报(信息科学版)》2025年第10期
P. 69
2004 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 10 月
I
式为: 两类信息构成 [22] ,一种是高斯项 V q ,可根据正态
I
V q = max(V q ,V q ) k = 1,2,…,N set (15) 分 布 函 数 和 定 位 解 标 准 差 计 算 ,如 V q = K q ⋅
( k )
( 0 )
f ( σ q ),式中 K q 可根据 CDF 函数、所分配的完好
( k )
1.3 可用性保证
性和连续性风险求解;另一种是偏差包络项 V q ,
Ⅱ
鉴于 LPV-200 进近阶段对垂直方向需求强
N set
烈 [20] ,后续算例仅围绕垂直维度展开。国际民航 如 V q = | S q,i|b nom,i,旨在将观测域中标称偏差
∑
Ⅱ
( k )
组 织 (international civil aviation organization, i = 1
b nom 最大程度映射至位置域。
ICAO)规定 LPV-200 进近阶段需满足:
Ⅱ
当卫星几何构型和 ISM 信息确定后, V q 可
1) 95% 置信度的精度小于或等于 4 m;
I
2) 99.999% 置信度的有效检验门限小于或 唯一确定,而 V q 中 K q 随着子集对应的完好性风
等于 15 m; 险 或 连 续 性 风 险 变 化 而 变 化 。 传 统 的 MHSS
3) 99.999 99% 置信度下无故障的垂直定位 ARAIM 算法将风险平均分配,然而不同子集所
误差小于或等于 10 m; 应 承 担 的 风 险 存 在 差 异 ,平 均 分 配 可 能 会 降 低
4) 99.999 99% 置信度的垂直告警限值等于
ARAIM 算法的可用性。因此,评估不同子集对
35 m。
完好性和连续性风险的贡献,并探寻一种风险分
通常条件 4)满足时其余条件常满足 [11] ,后续
配方法从而缓解保护级计算保守的问题具有重
实验将该条件作为强制条件,即保护级小于告警阈
值 表 明 ARAIM 算 法 提 供 的 LPV-200 进 近 服 务 要的研究价值。
可用。 2.2 风险优化分配思路及流程
DOP 的计算公式为:
2 风险优化分配方法
D DOP = (G W obs G ) -1 (16)
T
q
完 好 性 风 险 和 连 续 性 风 险 作 为 评 估 GNSS 式中, W obs 为当前观测的权阵 [23] 。
应 用 所 需 导 航 性 能(required navigation perfor‑ 由式(7)和式(16)可知,DOP 与 σ q 的计算方
( k )
mance, RNP)的两个重要指标,ICAO 已将其量 法相近 [24] ,且保护级的高斯项 V q 存在优化空间,
I
化,两者定义分别如下: 其值取决于不同子集定位解的标准差 σ q 及其完
( k )
1)完好性风险是指定位误差超过告警阈值
好性风险和连续性风险。因此,后续通过实验来
且未发出警告的概率,可由漏警率和先验故障率
分析不同 DOP 值的子集对完好性风险和连续性
描述 [21] 。
风险的贡献,旨在合理分配风险。
2)连续性风险是指终端在运行过程中检测
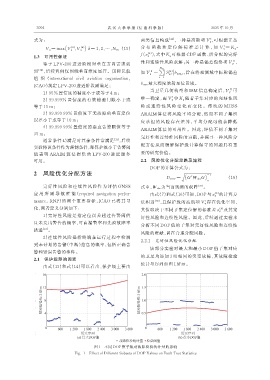
2.2.1 完好性风险优化分配
到未计划的告警(中断)信息的概率,包括正确告
该部分实验对最大和最小 DOP 值子集对应
警和错误告警的事件。
的卫星均添加 3 组相同的突变故障,其故障检验
2.1 保护级影响因素
统计量序列如图 1 所示。
由式(13)和式(14)可以看出,保护级主要由
图 1 不同 DOP 值子集对故障检验统计量的影响
Fig. 1 Effect of Different Subsets of DOP Values on Fault Test Statistics