
Page 116 - 《武汉大学学报(信息科学版)》2025年第10期
P. 116
第 50 卷第 10 期 张晨阳等:一种自适应点线特征和 IMU 耦合的视觉 SLAM 方法 2051
和线特征;(2)利用消影点特性聚类线特征,以便 构建紧耦合优化方程,并更新点线特征以及图像
筛选的线特征符合场景物理边缘结构信息;(3)基 帧在世界坐标系下的坐标;(5)回环检测采用点
于点线特征和 IMU 先验测量信息建立前端位姿 线词袋模型来检测回环,一旦检测到回环,便执
松耦合优化模型,并完成 SLAM 系统的初始化; 行全局光束法平差,以此提升视觉惯导 SLAM 算
(4)基于 IMU 预积分和点线特征重投影误差方程 法定位结果的准确性和鲁棒性。
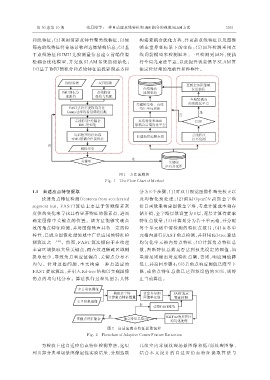
图 1 方法流程图
Fig. 1 The Flow Chart of Method
1.1 自适应点特征提取 分为 6 个步骤:(1)对双目视觉图像作畸变校正以
快速角点特征检测(features from accelerated 及均衡化预处理 ;(2)调用 OpenCV 高斯金字塔
segment test, FAST)算法主要基于邻域像素灰 接口函数来构建图像金字塔,考虑计算成本和存
度值的变化来寻找具有显著特征的像素点,进而 储开销,金字塔层数设置为 8 层,逐层计算待提取
确定图像中关键点的位置。该方法能够实现高 特征点数量;(3)计算划分为若干单元格,并分配
效的角点特征检测,并对图像噪声具备一定的鲁 每个单元格中需检测的特征点数目;(4)在各单
棒性,已成为图像处理领域中广泛应用的特征检 元格内进行 FAST 角点检测,并利用 Kd-tree 算法
测算法之一 [33] 。然而,FAST 算法倾向于在纹理 均匀化单元格内角点特征;(5)计算角点特征总
丰富区域提取大量关键点,而在纹理稀疏区域则 数,判断特征总数是否达到预先设定的阈值,如
提取较少,导致角点响应值偏高、关键点分布不 果满足则输出对应特征点集,否则,响应阈值降
均 匀 。 针 对 这 些 问 题 ,本 文 构 建 一 种 自 适 应 的 低 1,并返回步骤 4;(6)若角点响应阈值已降至下
FAST 提取算法,并引入 Kd-tree 结构以实现图像 限,或角点特征总数已达到预设值的 90%,则终
角点的均匀化分布。算法执行过程见图 2,具体 止当前算法。
图 2 自适应角点特征提取流程
Fig. 2 Flowchart of Adaptive Corner Feature Extraction
为检验上述自适应角点特征检测算法,这里 几组室内常规纹理场景图像和低/弱纹理图像,
列出部分典型场景图像定性实验结果,分别选取 结 合 本 文 设 计 的 自 适 应 角 点 特 征 提 取 算 法 与