
Page 118 - 《武汉大学学报(信息科学版)》2025年第10期
P. 118
第 50 卷第 10 期 张晨阳等:一种自适应点线特征和 IMU 耦合的视觉 SLAM 方法 2053
多特征匹配对,验证了其在提升匹配性能方面的 性。为提升算法可用性与可复用性,本文将该线
有效性。 特征提取方法嵌入到 OpenCV 开源库中,封装为
1.2 图像边缘信息自适应线特征提取 新的线特征提取接口,并扩展了高斯金字塔构建
目前,图像线特征的检测与提取常采用 LSD 与多尺度线特征检测功能,最终实现了自适应边
算法。该算法基于边缘像素的直方图统计实现 缘线特征提取函数的集成与调用。
直线段检测,具有计算速度快、检测精度高等优
点,并可通过参数调整适应不同场景下的线特征
提取需求 [32] 。然而,LSD 算法也存在一定的局限
性,容易产生过多短线段或断裂线段,同时对光
照变化较为敏感,可能导致提取的线特征与真实
物体边缘结构不一致。为解决上述问题,本文提
出一种基于图像边缘信息的自适应线特征提取
算法,其流程如图 5 所示。首先对输入图像进行
高斯模糊预处理,并计算整幅图像灰度值的中位
数;随后,基于该中位数自适应设定高低阈值,调
用 OpenCV 中的 Canny 边缘检测函数获取边缘二
图 5 基于图像边缘信息的自适应线特征提取流程
值图像。接下来,算法遍历边缘图像中的每一个
Fig. 5 Flowhart of Adaptive Line Feature Extraction
非零像素点,将其作为种子点,沿 8 个邻域方向进
Based on Image Edge Information
行搜索,统计连续非零像素的数量,并判断是否
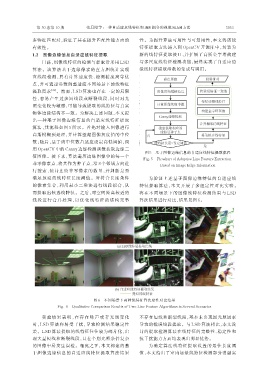
满足预设的线特征长度阈值。对符合长度条件 为验证上述基于图像边缘特征的自适应线
的像素集合,利用最小二乘法进行线段拟合,从 特征提取算法,本文开展了多组定性对比实验。
而提取出候选线特征。之后,对空间距离较近的 将在不同场景下的图像线特征检测结果与 LSD
线 段 进 行 合 并 处 理 ,以 优 化 线 特 征 的 结 构 完 整 算法结果进行对比,结果见图 6。
图 6 不同场景下两种线特征算法定性对比结果
Fig. 6 Qualitative Comparison Results of Two Line Feature Algorithms in Several Scenarios
实 验 结 果 表 明 ,在 存 在 噪 声 或 者 光 照 变 化 不存在短线和断裂线段,基本未出现因光照因素
时,LSD 算法容易受干扰,导致检测结果稳定性 导致的错误线段提取。与 LSD 算法相比,本文设
差。LSD 算法提取的线特征往往较为碎片化,出 计的提取检测算法在线特征的完整性、稳定性和
现大量短线和断裂线段,且在个别光照条件复杂 抗干扰能力方面均表现出明显优势。
的图像中易发生误检。相比之下,本文构建的基 为确定算法线特征提取设置的最佳长度阈
于图像边缘信息的自适应线特征提取算法结果 值,本文给出了室内场景线特征检测部分消融实