
Page 71 - 《武汉大学学报(信息科学版)》2025年第9期
P. 71
第 50 卷第 9 期 王 楠等:兼顾测距和通信需求的导航星座激光星间链路规划 1799
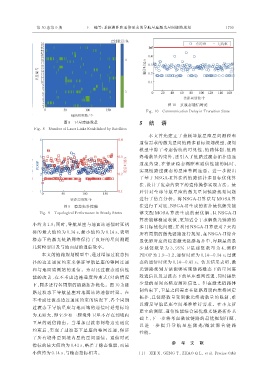
图 10 过渡态通信时延
Fig. 10 Communication Delay in Transition State
图 8 卫星建链数量 5 结 语
Fig. 8 Number of Laser Links Established by Satellites
本文首先建立了兼顾导航星座星间测距和
通信需求的激光星间链路多目标规划模型,规划
模型中除了考虑传统的可见性、链路体制、链路
终端数量约束外,还引入了链路过渡态拓扑边连
通度约束,在保证稳态测距和通信性能的同时,
实现链路过渡态的星座整网连通。进一步提出
了基于 NSGA-II 算法的链路拓扑多目标优化算
法,设计了复杂约束下的遗传操作实现方法。最
后针对全球导航星座的激光星间链路规划问题
进行了仿真分析。将 NSGA-II 算法与 MOSA 算
图 9 稳态拓扑性能 法进行了对比,NSGA-II 生成的拓扑最优解集能
Fig. 9 Topological Performance in Steady States 够 支 配 MOSA 算 法 生 成 的 最 优 解 ,且 NSGA-II
算法能够稳定收敛,更加适合于求解激光链路的
小约为 1.9;同时,导航星座与地面站通信时延指
多目标优化问题;并利用 NSGA-II 算法对 7 天内
标的最大值约为 0.34 s,最小值约为 0.14 s,表明 所有周期的激光链路进行规划,在 NSGA-II 综合
稳态下的激光链路网络保持了良好的星间测距 最优解对应的稳态激光链路拓扑中,每颗星的最
几何构型以及与地面站的通信效率。 少 建 链 数 量 为 3,95% 卫 星 建 链 数 量 为 4,测 距
本文的链路规划模型中,通过增加过渡态拓 PDOP 为 1.9~3.2,通信时延为 0.14~0.34 s;过渡
扑的边连通度约束来保证导航星座的整网连通 态的通信时延为 0.14~0.43 s。仿真结果表明,激
和与地面监测站的通信。为对比过渡态通信性 光链路规划方法能够实现链路稳态下的星间高
能的改善,在不考虑边连通度约束式(8)的情况 效通信以及过渡态下的星座整网连通,同时提供
下,同步进行各周期的链路拓扑优化。图 10 为链 少量的星间高精度测距信息。但在激光链路体
制约束下,卫星之间需要在链路周期内维持固定
路过渡态下导航星座对地面站的通信时延。在
拓扑,且链路数量受到激光终端数量的限制,难
不考虑过渡态边连通度约束的情况下,各个周期
以满足导航星座空间基准维持需求。在本文所
过渡态下导航星座与地面站的通信时延指标均
建立的测距、通信性能综合最优激光链路拓扑基
为无穷大,即至少有一颗境外卫星不存在到境内
础上,下一步将考虑微波链路的最优规划问题,
卫星的通信路由。当增加过渡态网络边连通度
以 进 一 步 提 升 导 航 星 座 激 光/微 波 混 合 链 路
约束后,实现了过渡态下星座的整网连通,保证
性能。
了所有境外星到境内星的星间通信。通信时延
参 考 文 献
指标的最大值约为 0.43 s,略差于稳态性能,而最
小值约为 0.14 s,与稳态指标相当。 [1] XIE X, GENG T, ZHAO Q L, et al. Precise Orbit