
Page 10 - 《武汉大学学报(信息科学版)》2025年第9期
P. 10
1738 武 汉 大 学 学 报 (信 息 科 学 版) 2025 年 9 月
自动驾驶等,构建感知-认知-行动一体化技术链。 决了传统对地观测中定位精度与覆盖范围的权
1)时空感知模块:集成 BDS 实时动态高精度 衡难题,更推动了地理信息技术从静态描述向动
定 位 [55] 、多 光 谱 视 觉 传 感 器 与 激 光 雷 达 SLAM 态感知-决策闭环的范式革新。
(simultaneous localization and mapping)系 统 [56] , 本文按照不同的集成方式和层次,提出了北
实现精准可靠的位姿估计与语义环境建模。 斗导航与高分遥感分层融合的时空具身智能技
2)认知决策模块:嵌入轻量化地理知识图谱 术架构,具体包括信号层、数据层、信息层、应用
(geospatial knowledge graph,Geo-KG),结合深度 层、学习层等 5 个层次,其中应用层根据其应用深
确 定 性 策 略 梯 度(deep deterministic policy gra⁃ 度又可细分为知识层、决策层、执行层 3 个层次,
dient,DDPG)算法,支持动态环境下的多目标优 如图 2 所示。
化决策 [57-59] 。
3)具身执行模块:采用力-位混合控制策略与
自适应运动规划算法,确保复杂地形条件下的精
准操作 [60-63] 。
在上述基础上,系统可通过数据-知识-行动
的迭代优化实现自我演进。
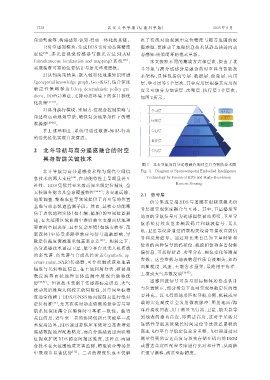
2 北斗导航与高分遥感融合的时空
具身智能关键技术
图 2 北斗导航与高分遥感融合的时空具身智能技术图
北斗导航与高分遥感技术作为现代空间信 Fig. 2 Diagram of Spatiotemporal Embodied Intelligence
息技术的两大支柱 [64] ,在功能特性上呈现显著互 Technology by Fusion of BDS and High-Resolution
补性。BDS 凭借其亚米最高厘米级定位精度、全 Remote Sensing
天候服务能力及全球覆盖特性 [65-67] ,为交通运输、
2.1 信号层
地质调查、精准农业等领域提供了高可靠的位置
信号集成是指 BDS 与遥感在射频或激光信
基准与动态轨迹监测手段。然而,其核心功能聚
号层面实现深度耦合与互补。其中,卫星播发至
焦于点状地理实体(如车辆、船舶)的空间位置描
地面的导航信号可为遥感提供被动照明,卫星导
述,在大范围区域监测中难以独立支撑面状地理
航 系 统 持 续 发 射 多 频 段 码 片 和 载 波 信 号 ,无 人
要素的空间表征,且在复杂环境(如城市峡谷、茂
机、卫星等设备通过搭载相关设备可接收直射信
密森林)中易受多路径效应与信号遮蔽影响,导
号和反射信号。通过对比来自已知卫星时钟和
致定位精度衰减至米级甚至更差 [68] 。相较之下,
位置的两种信号的码相位、载波相位和多普勒频
高分遥感技术通过卫星、航空平台及无人机搭载
偏信息,可获得延迟、功率分布、相位变化等测量
的多光谱、高光谱与合成孔径雷达(synthetic ap⁃
参数。这些参数与地表物理性质直接相关,如海
erture radar,SAR)传感器,可非接触式获取地表
面粗糙度、风速、土壤含水量等,最终用于海洋、
辐射与几何特征信息,在土地利用分类、植被指
土壤或大气参数反演 [74-77] 。
数 反 演 等 面 状 地 理 实 体 监 测 中 展 现 出 独 特 优
势 [69-71] 。但该技术受制于传感器标定误差、大气 遥感回波信号可参与目标物体的姿态估计
扰动及后处理几何校正的局限性,其空间坐标精 与位置修正,部分场景下也可实现导航定位的重
度通常依赖于 BDS/GNSS 地面控制点进行绝对 要补充。以飞行器地形匹配导航为例,机载或星
定位校准 [72] ,尤其在实时动态监测场景中需与导 载的雷达高度计会发射微波脉冲,照射地面/海
航系统深度耦合以确保时空基准一致性。值得 洋后接收回波,用于测量飞行器、卫星、航天器等
关注的是,近年来二者的协同创新已突破单一技 到地表的垂直高度,即雷达高度,这对于某些只
术应用边界,BDS 通过提供厘米级时空基准增强 靠惯性导航系统做长时间定位导致误差累积的
遥感数据地理配准精度,而高分遥感通过面状特 高速飞行平台导航定位非常重要,飞行器通过对
征提取扩展 BDS 的空间描述维度,这种点-面融 测量得到的雷达高度与预先存储在机内的 DEM
合技术在大范围地质灾害监测、精准农业等场景 或雷达高度匹配参考库进行比对和计算,从而修
中展现出显著优势 [73] 。二者的深度集成不仅解 正惯导漂移,改正坐标精度。