
Page 9 - 《武汉大学学报(信息科学版)》2025年第9期
P. 9
第 50 卷第 9 期 张 新等:时空具身智能:北斗导航与高分遥感融合发展新方向 1737
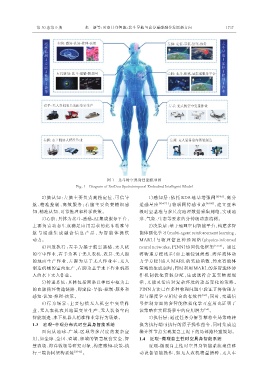
图 1 北斗时空具身智能模型图
Fig. 1 Diagram of BeiDou Spatiotemporal Embodied Intelligent Model
2)脑认知:左脑主要负责高精定位、可信导 1)感知层:依托 BDS 地基增强网 [42-44] 、高分
航 、精 准 控 制 、高 效 服 务 ;右 脑 主 要 负 责 精 细 感 遥感星座 [45-47] 与物联网传感节点 [48-50] ,建立亚米
知、精准认知、可靠推理和科学决策。 级时空基准与多尺度地理数据采集网络,实现地
3)心脏:具体为北斗-遥感-AI 集成服务平台, 形、气象、生态等要素的分钟级动态监测。
主要负责动态生成满足应用需求的北斗精准导 2)决策层:基于地理空间智能平台,构建多智
航 与 遥 感 集 成 融 合 信 息 产 品 ,为 智 能 体 提 供 能体强化学习(multi-agent reinforcement learning,
动力。 MARL)与 物 理 信 息 神 经 网 络(physics-informed
4)四肢执行:左手为基于航空遥感、无人机 neural networks,PINN)协同优化框架 [51-52] 。通过
的空中作业,右手为基于无人农机、农具、无人船 将物理方程残差(如土壤侵蚀模型、海洋流体动
的地面生产作业,左脚为基于无人作业车、无人 力学方程)嵌入 MARL 的奖励函数,约束智能体
制造机械的室内生产,右脚为基于水下作业机器 策略的生成空间;同时利用 MARL 的多智能体协
人的水下无人作业。 作 机 制 优 化 资 源 分 配 ,生 成 既 符 合 真 实 物 理 规
5)传递系统:具体包括两条以神经中枢为主 律,又能灵活应对复杂环境的动态变化的策略。
的血脉循环传递链路,即定位-导航-控制-服务和 PINN 方法已在多种物理问题中验证了将物理方
感知-认知-推理-决策。 程与深度学习相结合的有效性 [53] ;同时,交通信
6)行 为 场 景 :主 要 包 括 无 人 机 空 中 变 量 作 号控制方面的多智能体强化学习应用也证明了
业、无人农机农具地面变量生产、无人装备室内 该策略在实际场景中的应用潜力 [54] 。
智能制造、水下机器人精准作业等行为场景。 3)执行层:通过任务分解引擎将全局策略转
1.3 宏观-中观分布式时空具身智能系统 换为执行端可执行的原子操作指令,同时集成边
面 向 从 地 球 -广 域 -区 域 等 多 尺 度 的 复 杂 应 缘计算节点实现紧急工况下的局部路径重规划。
用,如全球、全国、省域、市域的智慧粮食安全、智 1.4 近观-微观自主性时空具身智能系统
慧农场、海洋牧场等研究对象,构建感知-决策-执 近观-微观自主性时空具身智能系统聚焦移
行三端协同架构系统 [39-41] 。 动设备智能操作,如无人农机精量播种、无人车