
Page 412 - 《软件学报》2025年第4期
P. 412
1818 软件学报 2025 年第 36 卷第 4 期
ˆ
Y Y
Fusion Loss
ˆ ˆ ˆ
Y h
Y d Y w
FC FC FC
ST block GCN+Conv GCN+Conv GCN+Conv
SAtt+TAtt
SAtt+TAtt
SAtt+TAtt
… … …
ST block GCN+Conv GCN+Conv GCN+Conv
SAtt+TAtt
SAtt+TAtt
SAtt+TAtt
x h x d x w
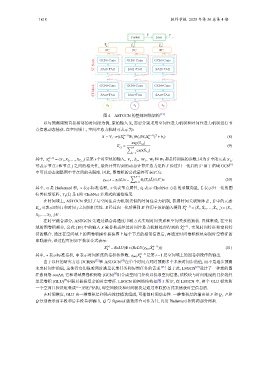
图 4 ASTGCN 的整体网络架构 [13]
以与预测周期直接相邻的时间段为例, 原始输入 X h 需要分别采用空间注意力机制和时间注意力机制进行节
点信息动态捕获. 在空间域上, 空间注意力机制可表示为:
S = V s ·σ((X (r−1) W 1 )W 2 (W 3 X (r−1) T (8)
) +b s )
h h
exp(S i,j )
′
i,j N
S = ∑ (9)
exp(S i,j )
j=1
,
,
其中, X (r−1) = (X 1 ,X 2 ,...,X T r−1 ) 是第 r 个时空块的输入, V s b s W 1 W 2 和 W 3 都是待训练的参数. 因为 S 中的元素 S i,j
,
h
′
j
可表示节点 i 和节点 之间的相关性, 最终计算得到的动态计算注意力矩阵 S 经过归一化后的 S 用于谱域 GCN [6]
中可以动态调整图中节点间的关联度. 因此, 图卷积的公式最终可表示为:
∑
K−1
′
g θ∗G x = g θ (L)x = θ k (T k ( ˜ L)⊙S )x (10)
k=0
⊙ 是 Hadamard Φ 表示时间维度的卷积核参数,
˜ L 表示归一化的图
θ k 表示
其中, 积, ∗ 表示标准卷积, x 代表节点属性, ChebNet 方法的系数向量,
拉普拉斯矩阵, T k ( ˜ L) 是 k 阶 ChebNet 多项式的递推结果.
在时间域上, ASTGCN 采用了与空间注意力机制类似的时间注意力机制, 获得时间关联矩阵 E E 中的元素
,
′ ˆ X (r−1)
E i,j 可表示时间 i 和时间 j 之间的相关性. E 经过归一化后得到 E 作用于原始输入得到 = ( ˆ X 1 , ˆ X 2 ,..., ˆ X T r−1 ) = (X 1 ,
h
)E .
′
X 2 ,...,X T r−1
在时空融合部分, ASTGCN 先通过耦合再通过串联方式实现时间关系和空间关系的捕获. 具体来说, 在空间
域的图卷积部分, 公式 (10) 中的输入 X 被替换成经过时间注意力机制处理得到的 ˆ X (r−1) , 实现时间特征和空间特
h
征的耦合. 通过在空间域上的图卷积操作捕获图上每个节点的相邻信息后, 再通过时间卷积模块实现时空特征的
串联融合, 该过程可用如下数学公式表示:
(r)
X = ReLU(Φ∗(ReLU(g θ∗G X ˆ (r−1) ))) (11)
h
h
其中, ∗ 表示标准卷积, g θ∗G X ˆ (r−1) 是第 r −1 层空间域上的图卷积操作的输出.
h
由于以往的研究方法 DCRNN [22] 和 ASTGCN [13] 在单个时间点同时预测多个未来时间步的值, 而不是逐步预测
未来时间步的值, 这使得它们很难同时满足长期任务和短期任务的需求 [23] . 基于此, LSGCN [23] 设计了一种新的图
[6]
注意网络 cosAtt, 它和谱域图卷积网络 (GCN) 组合成空间门控块以提取空间信息, 该模块与时间维度的门控线性
[7]
单元卷积 (GLU) 串联以捕获复杂的时空特征. LSGCN 的网络结构如图 5 所示, 在 LSGCN 中, 两个 GLU 模块和
一个空间门控块堆叠成“三明治”结构, 即空间模块和时间模块是通过串联的方式来捕获时空信息的.
在时间维度, GLU 由一维卷积层和残差连接模块组成, 可捕捉时间动态性. 一维卷积层的输出是 P 和 Q P 和
,
Q 分别表示前半段和后半段卷积输出, Q 与 Sigmoid 函数结合可作为门, 再用 Hadamard 积将两部分相乘.