
Page 416 - 《软件学报》2025年第4期
P. 416
1822 软件学报 2025 年第 36 卷第 4 期
总结来说, 由于连续时间动态图学习方法涉及的方法通常较为复杂, 需要在每个时间步更新节点内存信息, 在
大规模图上计算复杂度高, 限制了它在真实场景上的应用. 此外, 连续时间动态图学习方法的性能依赖于初始状态
和参数的选择, 鲁棒性较低, 在实际应用时, 可能需要通过多次调参, 以提升模型的鲁棒性.
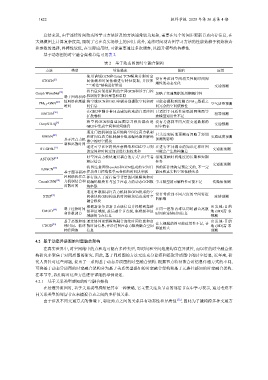
基于动态图的时空融合架构总结可见表 2.
表 2 基于动态图的时空融合架构
方法 类型 算法描述 缺陷 应用
使用谱域GCN和Gated TCN模块分别对空
STGCN [5] 间依赖和时间依赖进行特征提取, 并按照 没有考虑到空间相关性随时间周
“三明治”结构进行堆叠 期性的动态变化 交通预测
将自适应邻接矩阵的空间GCN和基于门控
[18]
Graph WaveNet 忽略了交通数据的周期规律性
基于图卷积神 机制的扩张因果卷积串联
经网络和离散 将空域GCN和GRU串联分别提取空间和时 可能会提取到监测点PM 2.5 数据之
[27]
PM 2.5 -GNN 空气质量预测
时间 间信息 间冗余的空间依赖性
在GRU中耦合带同态感知约束的自适应图 只适用于同质性较强的网络而导
[28]
HAGEN 犯罪预测
在本节中, 我们将对这些方法进行详细的举例论述.
扩散卷积 致模型通用性不足
将空间GCN和自适应图学习模块耦合进 没有考虑到不同尺度交通数据的
[8]
DeepSTUQ 交通预测
GRU中集成空间和时间信息 时空特征
通过门控机制自适应地将空间注意力机制
GMAN [29] 和时间注意力机制融合组成编码器和解码 只关注到长期预测而忽略了短期 交通速度预测
基于注意力机 器中的时空模块 预测的影响
制和离散时间
ST-GFSL [11] 通过可学比率将图注意网络和GRU学习到 在进行不同城市的知识迁移时图 交通流预测
的空间和时间元知识进行加权求和 可能会产生结构偏差
时空注意力模块通过耦合的方式与时空卷 很难兼顾时间维度的长期和短期
ASTGCN [13]
积层结合 任务
交通流预测
将图注意网络cosAtt和GCN组成的空间门 图的拓扑结构是预定义的, 不一定
LSGCN [23]
基于图卷积神 控块和门控线性单元卷积的时间块串联 能反映真实的空间依赖关系
经网络和注意 并行嵌入了流行病学背景的因果模块和时
CausalGNN [30] 力机制结合和 间编码模块再与基于注意力的动态GCN模 学习模型的可解释性可能不足 传染病预测
离散时间 块串联
通过串联将用注意力机制和GCN组成的空
STEP [31] 间模块和GRU构成的时间模块结合成时空 没有考虑到不同尺度的空间特征 疫情预测
融合模块 的影响
根据新事务更新节点级信息并投射到集群 出发地-目的
基于连续时间 在同一框架内难以同时融合离散
CMOD [24] 级和区域级, 最后融合节点级, 集群级和区 地 (OD)需 求
和参数调节 时间和连续时间信息
域级的节点信息 预测
基于离散和连 通过协同更新模块融合连续时间信息和离 出发地-目的
CDOD [25] 续时间、循环 散时间信息, 并经过图注意力模块融合空间 在大规模的图可能适用性不足, 计 地 (OD)需 求
神经网络 信息 算量较大 预测
4.2 基于动态异质图的时空融合架构
在真实世界中, 时空网络中的点和边可能有多种类型, 即时间和空间维度均存在异质性, 而以往的时空融合架
构研究多聚焦于对同质图的研究. 因此, 基于同质图的方法无法充分建模和提取异质图中的时空信息, 近年来, 研
究人员针对这些问题, 提出了一系列基于动态异质图的时空融合架构. 根据节点特征聚合时信息传递方式的不同,
可将基于动态异质图的时空融合架构分为基于关系类型感知的时空融合架构和基于元路径感知的时空融合架构.
4.2.1 基于关系类型感知的时空融合架构
在处理异质图时, 基于关系类型感知是其中一种策略, 它主要关注从节点的邻居节点中学习表示, 通过考虑不
同关系类型的邻居节点来捕捉节点之间的多样性关系.
由于涉及不同交通方式的情境下, 邻近站点之间的关系具有动态性和异质性 [32] , 因此为了建构跨多种交通方