
Page 186 - 《软件学报》2024年第4期
P. 186
1764 软件学报 2024 年第 35 卷第 4 期
N
1
i
i
MAPE = ∑ | y − y ˆ | (24)
N i= 1 y i
其中, N 为样本数据的数量, y i 为真实值, ˆ y 为预测值.
i
3.4 实验结果与分析
(1) 高速公路流量数据集预测结果分析
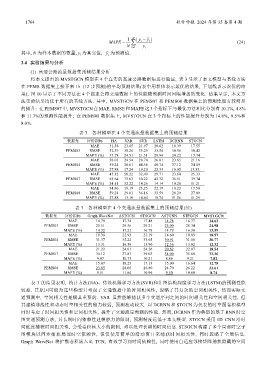
将本文提出的 MVSTGCN 模型在 4 个真实的高速公路数据集进行验证, 表 3 显示了本文模型与基线方法
在 PEMS 数据集上接下来 1h (12 步预测)的平均预测结果(表中用粗体表示最优的结果, 下划线表示次优的结
果), 图 10 显示了不同方法在 4 个高速公路交通数据上的性能随预测时间间隔增加的变化. 结果显示, 本文方
法实验结果均优于所有的基线方法. 其中, MVSTGCN 在 PEMS07 和 PEMS08 数据集上的预测性能有较明显
的提升: 在 PEMS07 中, MVSTGCN 在 MAE, RMSE 和 MAPE 这 3 个指标下与最优方法相比分别有 10.1%, 4.8%
和 11.7%的预测性能提升; 在 PEMS08 数据集上, MVSTGCN 在 3 个指标上的性能提升分别为 14.8%, 8.5%和
8.0%.
表 3 各种模型在 4 个交通流量数据集上的预测结果
数据集 评价指标 HA VAR SVR LSTM DCRNN STGCN
MAE 31.58 23.65 21.97 20.62 18.39 17.55
PEMS03 RMSE 52.39 38.26 35.29 33.54 30.56 30.42
MAPE (%) 33.78 24.51 21.51 28.94 20.22 17.34
MAE 38.03 24.54 28.70 26.81 23.65 21.16
PEMS04 RMSE 59.24 38.61 44.56 40.74 37.12 34.89
MAPE (%) 27.88 17.24 19.20 22.33 16.05 13.83.
MAE 45.12 50.22 32.49 29.71 23.60 25.33
PEMS07 RMSE 65.64 75.63 50.22 45.32 36.51 39.34
MAPE (%) 24.51 32.22 14.26 14.14 10.28 11.21
MAE 34.86 19.19 23.25 22.19 18.22 17.50
PEMS08 RMSE 59.24 29.81 36.16 33.59 28.29 27.09
MAPE (%) 27.88 13.10 14.64 18.74 11.56 11.29
表 3 各种模型在 4 个交通流量数据集上的预测结果(续)
数据集 评价指标 Graph WaveNet ASTGCN STSGCN ASTGNN STFGCN MVSTGCN
MAE 14.79 17.34 17.48 14.78 16.77 14.63
PEMS03 RMSE 25.51 29.56 29.21 25.00 28.34 24.98
MAPE (%) 14.32 17.21 16.78 14.79 16.30 13.59
MAE 19.36 22.93 21.19 18.60 19.83 18.57
PEMS04 RMSE 31.37 35.22 33.65 30.91 31.88 30.77
MAPE (%) 13.31 16.56 13.90 12.36 13.02 12.32
MAE 21.22 24.01 24.26 20.62 22.07 18.54
PEMS07 RMSE 34.12 37.87 39.03 34.00 35.80 32.36
MAPE (%) 9.07 10.73 10.21 8.86 9.21 7.82
MAE 15.07 18.25 17.13 15.00 16.64 12.78
PEMS08 RMSE 23.85 28.06 26.80 24.70 26.22 22.61
MAPE (%) 9.51 11.64 10.96 9.50 10.60 8.74
表 3 的结果表明, 统计方法(HA)、传统机器学习方法(SVR)和非图结构深度学习方法(LSTM)的预测性能
较差. 其原因可能为这些模型只考虑了交通数据中的时间相关性, 忽略了其复杂的空间相关性, 然而实际交
通预测中, 空间相关性是极其重要的. VAR 虽然能够捕获多个交通序列之间的时间相关性和空间相关性, 但
其建模非线性和动态时空相关性的能力较弱, 预测波动较大. 以 DCRNN 和 STGCN 为代表的时空图卷积模型
同时考虑了时间相关性和空间相关性, 提升了交通流量预测的性能. 然而, DCRNN 作为典型的基于 RNN 时空
图交通预测方法, 其长期时间依赖性建模能力的限制, 预测精度远低于本文模型. STGCN 采用 1D CNN 沿时
间维度捕获时间相关性, 会受卷积核大小的限制, 难以处理长期的时间信息. STSGCN 构建了多个局部时空子
图模块以同步捕获局部时空依赖性, 但仅使用简单的滑动窗口来捕获时间相关性, 同时忽略了全局信息.
Graph WaveNet 将扩散卷积嵌入至 TCN, 有效学习到时间依赖性, 同时使用自适应邻接矩阵捕获隐藏的空间