
Page 183 - 《软件学报》2024年第4期
P. 183
赵文竹 等: 多视角融合的时空动态 GCN 城市交通流量预测 1761
了静态地理空间信息和动态时序语义信息, 可以有效挖掘交通路网中的静态空间特性与动态时序模式.
2.4.3 全局表示学习模块
从节点的全局视角出发, 本文提出了路网的全局表示学习模块用于捕获路网中不同节点之间的全局空间
相关性. 交通数据的空间相关性不仅存在于邻近的节点之间, 以整个道路网络而言, 长距离跨度的节点之间
也存在空间相关性, 例如城市交通重要节点发生堵塞时, 不仅会影响邻近节点的交通状况, 同时会影响较远
距离节点的交通状况, 从而导致路网全局节点交通流量的变化. 因此, 本文使用皮尔逊相关系数来分析交通
网络中节点之间的全局空间相关性. 对于路网中任意节点 i 和 j, 构建二者之间的全局相关性矩阵 A G ij ∈ NN× ,
表示如下:
T (x − ∑ X )(x − X )
A ij G = t= 1 , t i i , t j j (16)
∑ T t= 1 (x − , t i X i ) ∑ 2 T t= 1 (x , t j − X j ) 2
其中, X i =(x 1,i ,x 2,i ,…,x t,i )为节点 i 在 t 时间段内的交通流量特征, X 为 X i 的平均值. 通过设置相关性阈值 k, 选
i
择高相关性的节点对. 若节点之间的相关性度量大于 k, 则保持其相关性度量值; 反之, 表示为 0.
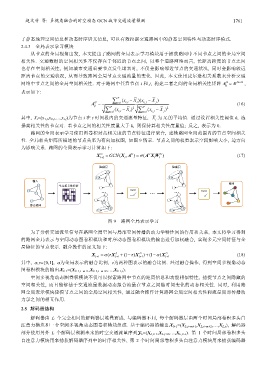
路网的全局表示学习使用图卷积对高相关度的节点特征进行聚合, 建模路网全局范围内的节点空间相关
性. 全局相关矩阵所描述的节点关系为有向加权图, 如图 9 所示. 节点之间的权重表示空间影响大小, 边方向
为影响关系. 路网的全局表示学习计算如下:
,
X l+ G 1 = GCN (X A G ) s A XW l G ) (17)
(
=
G
l
l
隐藏层 隐藏层
输入
输出
全局相关性矩阵
ReLU ReLU
… … …
静态路网
图 9 路网全局表示学习
为了分析交通流量信号在路网全局空间与局部空间传播的动力学特性间的作用和关系, 本文将学习得到
的路网全局表示与空间动态图卷积模块和时序动态图卷积模块的输出进行加权融合, 实现多元空间特征与全
局特征的节点表示. 融合操作的定义如下:
( X
+
)
−
l+ 1 = X ατ l+ S 1 + (1 τ X l+ D 1 ) (1 α X G l+ 1 (18)
)
−
其中, α,τ∈[0,1], α为全局表示的融合比例, τ为两种图表示的融合比例. 经过融合操作, 得到空间多视角动态
图卷积模块的输出 l+1 =(X l+1,t−m+1 ,X l+1,t−m+2 ,…,X l+1,t ).
空间多视角动态图卷积模块不仅可以探索路网中节点的距离信息和功能相似特性, 捕捉节点之间隐藏的
空间相关性, 而且能够基于交通流量数据动态拟合流量在节点之间随时间变化的动态相关性. 同时, 利用路
网全局表示模块建模节点之间的全局空间相关性, 通过融合操作计算路网全局空间相关性和流量局部传播动
力学之间的相互作用.
2.5 解码器结构
解码器由 L 个完全相同的解码器层堆叠而成. 与编码器不同, 每个解码器层由两个时间局部卷积多头自
注意力模块和一个空间多视角动态图卷积模块组成. 基于编码器的输出 l+1 =(X L,t−m+1 ,X L,t−m+2 ,…,X L,t ), 解码器
部分使用另外 L 个解码层预测未来的时空交通流量序列 L =(X L,t+1 ,X L,t+2 ,…,X L,t+n ). 第 1 个时间局部卷积多头
自注意力模块用来捕获解码器序列中的时序相关性, 第 2 个时间局部卷积多头自注意力模块用来捕获编码器