
Page 178 - 《软件学报》2024年第4期
P. 178
1756 软件学报 2024 年第 35 卷第 4 期
定义 2(交通流量矩阵). 以交通网络 G 中节点为信号采集点, 在 t 时刻采集的观测值被定义为交通流量矩
C
阵 X t =(x t,1 ,x t,2 ,…,x t,n )∈ N×C , 其中, x t,v ∈ 定义为节点 v 在时刻 t 的特征向量, C 为观测值的取值数量. 例如, C
为 2 时, 观测值为交通流入和流出数据.
定义 3(交通流量预测). 给定过去 m 个时间片的历史时空交通流量矩阵=(X t−m+1 ,X t−m+2 ,…,X t )∈ N×m , 交通
流量预测的目标是从历史交通流量观测值中学习映射函数 f, 结合交通网络 G 上的 N 个相关观测点去预测未
来 n 个时间步的交通流量矩阵:
f
[X tm 1 , X tm 2 ,..., X t ; ]G → X t+ 1 , X t+ 2 ,..., X t n ] (1)
[
−+
−+
+
2.2 多视角融合的时空动态图卷积网络
本文提出的 MVSTGCN 分别从空间维度和时间维度建模路网中复杂的动态时空相关性, 实现准确的交通
流量预测. MVSTGCN 采用在输入数据上嵌入特征的编码器-解码器框架, 编码器和解码器分别由多层相同的
编码器层和解码器层堆叠而成, 主要包含空间多视角动态图卷积模块和时间局部卷积多头自注意力机制模
块. 原始输入交通数据通过嵌入模块捕获交通数据的空间异质性和顺序信息, 时间局部卷积多头自注意力捕
获包含局部趋势信息的时间动态相关性. 在空间多视角动态图卷积模块中, 设计了空间结构图和动态关联图
分别捕捉交通路网节点的静态信息和动态模式, 引入自注意力机制捕获空间节点隐藏的动态关联, 从全局视
角引入全局表示建模全局空间相关性. 为了保证随着模型的深入能够进行有效训练, 每一层都添加了残差连
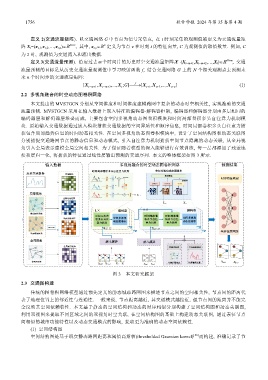
接和层归一化, 将捕获的特征通过线性层输出预测的交通序列. 本文的整体框架如图 3 所示.
图 3 本文研究框架
2.3 交通图构建
传统的图卷积网络模型通过预先定义的静态城市路网图来描述节点之间的空间相关性, 节点间的距离代
表了地理位置上的邻近性与连通性. 一般来说, 节点距离越近, 其交通模式越接近, 但节点间的距离并不能完
全反映其空间依赖特性. 本文基于静态的空间结构和动态的时序相似分别构建了空间结构图和动态关联图,
利用双视图来提取不同区域之间的双视角时空关联, 在空间结构图的基础上构建动态关联图, 通过表征节点
间相似的城市功能特性以及动态交通模式的影响, 提取更为准确的动态空间依赖性.
(1) 空间结构图
空间结构图是基于现实静态路网距离和阈值高斯核(thresholded Gaussian kernel) [36] 而构建, 准确记录了节