
Page 177 - 《软件学报》2024年第4期
P. 177
赵文竹 等: 多视角融合的时空动态 GCN 城市交通流量预测 1755
[6]
出与外部因素结合, 预测每个地区的人群流量; Li 等人 提出了深度时空自适应 3DCNN 实现交通流量预测,
通过自适应 3D 卷积模块同时捕捉时空关系, 根据历史数据影响灵活分配不同的权重, 并通过外部特征嵌入模
块捕获外部因素对流量的影响; Zheng 等人 [25] 将 CNN 与长短时记忆单元(long short-term memory, LSTM)结合
使用, CNN 学习空间上的 2D 流量数据, LSTM 从时间序列上建模时间相关性, 同时增加嵌入模块捕获天气和
路线结构的特征信息. 上述方法通过将城市或区域建模为规则网格, 使用 CNN 获取空间相关性. 虽然 CNN 具
有较好的特征学习能力, 但只能应用于欧式数据, 而现实生活中的交通网络结构是具有复杂拓扑结构的非欧
式数据, 无法从本质上表征交通网络的空间依赖特性.
1.3 基于图神经网络的交通流量预测
图神经网络成功地将卷积操作推广至非欧式结构的图数据, 能有效地提取拓扑结构的特征, 广泛地应用
于社交网络 [26] 、知识图谱 [27] 、推荐系统 [28] 等领域. 为解决 CNN 无法捕捉路网拓扑结构特征的问题, 研究人
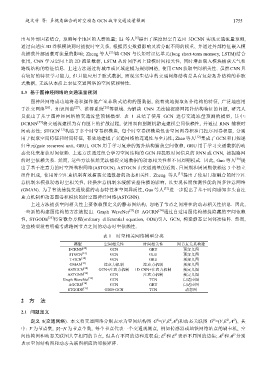
员提出了基于图神经网络的交通流量预测模型. 表 1 总结了使用 GCN 进行交通流量预测的模型, 其中:
DCRNN [29] 将交通流建模为有向图上的扩散过程, 使用双向图随机游走建模空间依赖性, 并通过 RNN 捕获时
间动态性; STGCN [13] 构造了多个时空卷积模块, 每个时空卷积模块包含空间图卷积和门控序列卷积层, 分别
用于提取空间特征和时间特征, 有效地建模了交通网络的连通性与全局性; Zhao 等人 [12] 集成了 GCN 和门控递
归单元(gate recurrent unit, GRU), GCN 用于学习复杂的拓扑结构捕获空间依赖, GRU 用于学习交通数据的动
态变化来捕获时间依赖. 上述方法通过组合学习空间结构的 GCN 和提取时间信息的 RNN 或 CNN, 捕捉路网
的时空依赖关系. 然而, 这些方法依然无法捕捉交通数据的动态相关性和不同周期模式. 因此, Guo 等人 [30] 提
出了基于注意力的时空图卷积网络(ASTGCN). ASTGCN 由交通流量的近期、日周期和周周期依赖这 3 个独立
组件组成, 使用时空注意机制有效捕获交通数据的动态相关性. Zheng 等人 [31] 提出了使用门控融合的时空注
意机制来模拟动态时空相关性, 转换注意机制来缓解误差传播的影响, 以实现长期预测性能的图多注意网络
(GMAN). 为了有效捕捉交通数据的动态特性和空间异质性, Guo 等人 [32] 进一步提出了基于时间感知多头自注
意力机制和动态图卷积模块的时空图神经网络(ASTGNN).
上述方法捕获空间相关性主要依赖预定义的静态图结构, 忽略了节点之间潜在的动态相关性信息. 因此,
一些新的构建图结构的方法被提出. Graph WaveNet [33] 和 AGCRN [34] 通过自适用图结构捕捉隐藏的空间依赖
性, STGODE [35] 将常微分方程(ordinary differential equation, ODE)引入 GCN, 构建静态空间邻接矩阵. 然而,
这些模型没有明确考虑路网节点之间的动态时空依赖性.
表 1 时空相关网络模型分类
模型 空间相关性 时间相关性 图节点关系构建
DCRNN [29] GCN GRU 预定义图
STGCN [13] GCN GLU 预定义图
T-GCN [12] GCN GRU 预定义图
GMAN [31] 注意力机制 注意力机制 预定义图
ASTGCN [30] GCN+注意力机制 1D CNN+注意力机制 预定义图
ASTGNN [32] GCN 注意力机制 预定义图
Graph WaveNet [33] GCN TCN 自适应图
AGCRN [34] GCN GRU 自适应图
STGODE [35] ODE+GCN TCN 动态图
2 方 法
2.1 问题定义
D
S
S
S
D
D
定义 1(交通网络). 本文将交通网络分别表示为空间结构图 G =(V,E ,A )和动态关联图 G =(V,E ,A ), 其
中: V 为节点集, |V|=N 为节点个数, 每个节点代表一个交通观测点, 例如传感器或地铁网络站点的刷卡机, 空
S
D
S
D
间结构图和动态关联图共享相同的节点, 但具有不同的边和边权重; E 和 E 表示不同图的边集; A 和 A 分别
表示空间结构图和动态关联图相应的邻接矩阵.