
Page 52 - 《软件学报》2021年第7期
P. 52
1970 Journal of Software 软件学报 Vol.32, No.7, July 2021
响应值.距离障碍物的值也如图 10 所示,前两个避障过程中最近的距离非常接近 0.2 的阈值,而第 3 个最近的距
离大约为 0.1.
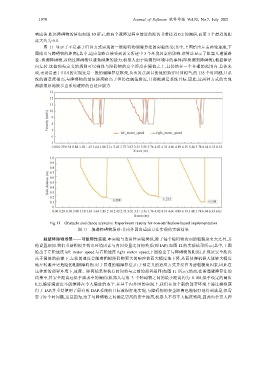
图 11 显示了不是基于归因方式实现的一般障碍物规避算法的实验结果(其中,上图给出左右两轮速度,下
图给出与障碍物的距离),其中,适应策略直接受到前文所述中 3 个环境因素的影响.该算法显示了机器人遵循路
径、检测障碍物,并绕过障碍物以避免碰撞的能力.机器人由于监测到环境中的事件(即检测到障碍物),根据算法
向左转.这些预先定义的规则可以确保与障碍物的安全距离在阈值之上,且仍然在一个合理的范围内.总体来
说,无论是基于归因的实现还是一般的避障算法框架,从出发点到目的地的执行时间相当,约 135 个时间戳,且系
统的满意度很高,与障碍物的最短距离略高于但仍在阈值附近,且都能满足系统目标.因此,这两种方式的实现
都能很好地展示出系统避障的自适应能力.
Fig.11 Obstacle avoidance scenario: Experiment results for non-attribution-based implementation
图 11 躲避障碍物场景:非内外因自适应方法实现的实验结果
躲避障碍物场景——可复用性实验.本实验与适用性实验类似,除了每个障碍物表面的粗糙度更大之外,其
他设置相同.我们重新模拟并找出环境因素与内因变量之间的关系(即 IAP).如图 12 的实验结果所示(其中,上图
给出了左轮速度 left_motor_speed 与右轮速度 right_motor_speed,下图给出了与障碍物的距离),在保证安全距离
高于阈值的前提下,左轮的速度会随着粗糙障碍物更大的响应值而大幅度地下降,从而使得机器人能够大幅度
地左转避开更危险的粗糙障碍物.对于普通的避障算法,由于预定义的适应方式并没有考虑粗糙度因素,因此在
这种新的部署环境下,速度、距离结果和执行时间将与之前的部署相同(如图 11 所示).然而,在普通避障算法的
结果中,其安全距离远低于需求中的阈值(机器人与第 3 个障碍物之间的最小距离约为 0.108,低于设定的阈值
0.2),偏好满意度不能维持在令人满意的水平.在基于内外因的实现上,我们在这个新的部署环境上通过模拟获
得了 IAP,并重复使用了原有的 DAP.系统的目标被很好地实现,与障碍物的安全距离也能很好地得到满足,但需
要 170 个时间戳,这是因为,为了与障碍物之间满足更高的安全距离,机器人不得不大幅度转向,因此也会更大程