
Page 49 - 《软件学报》2021年第7期
P. 49
李念语 等:一种基于分层适应逻辑的自适应系统实现框架 1967
我们采用 Pioneer 3-DX 机器人作为内外因应用的另一个案例研究.Pioneer 3-DX 机器人是一款理想的小型
轻量级机器人,它有两个轮子分别由两个差速器驱动,且配有红外传感器来检测障碍物.该机器人由于具有通用
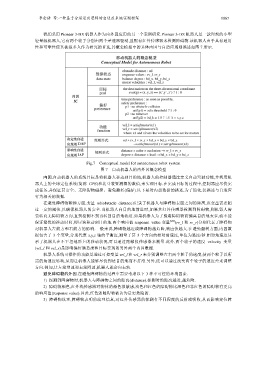
性和可靠性使其被很多人作为研究的首选,其概念模型中的具体内因与自适应规则描述如图 7 所示.
Fig.7 Conceptual model for autonomous robot system
图 7 自动机器人的内外因概念模型
内因.自动机器人的系统目标是将机器人移动到目的地,机器人的控制器通过定义自动驾驶功能,并利用机
器人上的全球定位系统(简称 GPS)和北斗装置测得的数值,来实现目标.在完成目标的过程中,控制器应尽快完
成任务,并保证其安全、无障碍物碰撞、避免翻转(偏好).以下是对内部数据的描述,为了简化,仅描述与自适应
行为相关的数据.
在避免障碍物碰撞方面,变量 od(obstacle distance)记录了机器人与障碍物表面之间的距离,该变量需要超
过一定的阈值,以确保机器人的安全.当机器人向目的地前进时,如果其红外传感器检测到障碍物,则机器人需
要转向无障碍物方向,直到检测不到再转回目的地轨道.如果机器人为了躲避障碍物而偏离目的地太多,就不能
保证最优的移动时间,即尽快移动到目的地.两个响应值 response value 变量 [29] (rv_l 和 rv_r)分别代表了障碍物
对机器人左前方和右前方的影响.一般来说,障碍物越近或障碍物越危险,响应值越大.在避免翻转方面,内因数
据包含了 3 个变量,分别代表 x,y,z 轴的平衡度,测量了其 3 个方向的相对角速度,单位为弧度/秒.相对角速度显
示了机器人在不平坦地形上的移动状况,可以通过陀螺仪传感器来测量.此外,两个轮子的速度 velocity 变量
(vel_l 和 vel_r)是影响偏好满意度和目标实现的另外两个内因数据.
机器人系统可操作的功能是通过可控变量 vel_l 和 vel_r 来分别调整左右两个轮子的速度,使两个轮子以所
需的角速度转动,从而让机器人能够尽快到达目的地而不打滑.另外,还可以通过改变两个轮子的速度差来调整
方向.例如,让左轮增速和右轮降速,机器人就会向右转.
避免障碍物的外因.在避免障碍物的过程中需要考虑以下 3 种不可控的环境因素.
1) 探测到障碍物时,机器人与障碍物之间的距离(distance).探测时的距离越近,越危险.
2) 障碍物颜色,红外线传感器对物体的颜色很敏感,浅色和红色的障碍物比深色和非红色的障碍物有更高
的响应值(response value).因此,红色的障碍物被认为是更危险的.
3) 障碍物纹理,障碍物表明的纹理信息,对红外传感器的探测有不同程度的反射或吸收,从而影响定位障