
Page 87 - 《摩擦学学报》2021年第3期
P. 87
376 摩 擦 学 学 报 第 41 卷
触觉感知的特殊性,即人体通常需要较长时间的直接 3.0
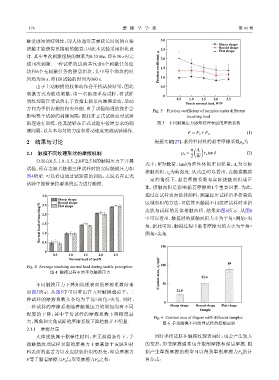
Sharp shape
接触才能获得更精确的触觉,因此本试验采用组块设 2.5 Round shape
Flat shape
计. 其中单次刺激组块的频率为0.33 Hz,即在30 s内完 2.0
成10次刺激. 一种试样的试验共包含6个刺激任务组 Friction coefficient, μ
块和6个无刺激任务的静息组块,其中每个组块的时 1.5
间均为30 s,即1组试验的时间为360 s. 1.0
由于主动触摸的肢体动作会干扰试验结果,因此 0.5
刺激方式为被动刺激,由一名助理手持试样,将试样
0
的纹理面在受试的右手食指上做单向摩擦运动,运动 0.5 1.0 1.5 2.0 2.5
Touch normal load, W/N
方向为手指内侧向指尖外侧. 由于试验助理的操作会
Fig. 5 Friction coefficient of samples under different
影响整个试验的刺激间隔,因此在正式试验前对试验 touching load
助理进行训练,使其能够在正式试验中按照要求的刺 图 5 不同触摸压力感知纹理表面的摩擦系数
激间隔、以基本均匀的力度和滑动速度完成试验操作.
F = F a + F d (1)
2 结果与讨论 根据文献[27],黏弹性材料的黏着摩擦系数μ 为
a
( )
π A r
2.1 触摸不同纹理形状的摩擦机制 µ a = τ a tanδ (2)
2 W
分别在0.5、1.0、1.5、2.0和2.5 N的触摸压力下开展
式中:W为载荷,tanδ为弹性体的正切模量,A 为实际
r
试验,所有志愿者触摸三种试样时的实际触摸压力如
接触面积,τ 为剪强度. 从式(2)可以看出,在触摸载荷
a
图4所示. 可以看出通过试验前的训练,志愿者在正式
一定的情况下,黏着摩擦系数与实际接触面积成正
试验中能够保持要求的压力进行触摸.
比,接触面积是影响黏着摩擦的1个重要因素. 为此,
3.0 通过在试样表面涂抹颜料,测量按压试样后手指染色
Sharp shape
Round shape 区域面积的方法,可估算出触摸不同纹理试样时手指
Normal load of touching/N 2.0 中可以看出,触摸时的接触面积大小为平角>圆角>尖
2.5
Flat shape
皮肤与试样的近似接触面积,结果如图6所示. 从图6
1.5
角,据此可知,触摸过程中黏着摩擦力的大小为平角>
1.0
圆角>尖角.
0.5
150
0
0.5 1.0 1.5 2.0 2.5
Normal load of test/N
Fig. 4 Average touching normal load during tactile perception 100 89
图 4 触摸过程中的平均触摸压力 Contact area, A r /mm 2
52.6
不同触摸压力下感知纹理表面的摩擦系数结果 50
如图5所示. 从图5中可以看出在五种触摸载荷下,三 21.8
种试样的摩擦系数大小均为平角>圆角>尖角. 同时,
0
三种试样的摩擦系数随着触摸压力的增加均有不同 Sharp shape Round shape Flat shape
Sample
程度的下降,其中平角试样的摩擦系数下降幅度最
Fig. 6 Contact area of fingers with different samples
大,圆角和尖角试样的摩擦系数下降趋势并不明显. 图 6 手指触摸不同纹理试样的接触面积
2.1.1 摩擦分量
人体皮肤属于黏弹性材料,在无润滑条件下,手 同时手指皮肤在触摸纹理表面时,也会产生较大
指触摸纹理试样表面的摩擦力主要来源于皮肤和材 的变形,形变摩擦通常包含犁削摩擦和滞后摩擦. 根
料表面的黏着力以及皮肤软组织的形变,即总摩擦力 据产生犁削摩擦的模型可以得到犁削摩擦力F 的计
p
F等于黏着摩擦力F 与形变摩擦力F 之和: 算公式:
d
a