
Page 88 - 《高原气象》2026年第2期
P. 88
高 原 气 象 45 卷
388
2 数据来源与方法介绍
2. 1 数据来源
2. 1. 1 观测数据
本研究使用的观测月平均气温数据为CN05. 1,
数据时段为 1961 -2014 年, 空间分辨率为 0. 25°×
0. 25°(吴佳和高学杰, 2013)。数据集基于中国范
围内 2416 个地面观测台站资料(包括基准站、 基本
站和国家一般气象站), 经过质量控制后, 使用薄
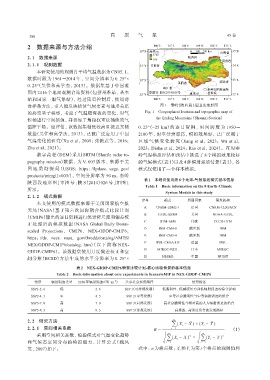
盘样条方法, 引入能反映插值气候要素与地形关系 图1 秦岭(陕西段)范围及地形图
的协变量子模型, 考虑了气温随海拔的变化, 对气 Fig. 1 Geographical location and topographic map of
the Qinling Mountains (Shaanxi Section)
候场进行空间插值, 并叠加了角距权重法插值的气
温距平场。经评估, 该数据集精度较高且接近实测 0. 25°(~25 km)的逐日资料, 时间跨度为 1950 -
数据(吴佳和高学杰, 2013), 已被广泛应用于中国 2100 年, 时空分辨率高, 模拟效果好, 已广泛用于
气温变化的研究(Xu et al, 2009; 张艳武等, 2016; 区 域 气 候 变 化 研 究(Jiang et al, 2023; Wu et al,
Zhu et al, 2021)。 2023; Dioha et al, 2024; Rao et al, 2024)。在对秦
数字高程(DEM)采用 SRTM(Shuttle radar to‐ 岭气温模拟评估和预估中挑选了 8个模拟效果较好
pography mission)数据, 为 V. 003 版本, 来源于美 的气候模式(表 1)以及 4种辐射强迫情景(表 2), 各
国 地 质 勘 探 局(USGS; https: //lpdaac. usgs. gov/ 模式仅使用了一个样本模拟。
products/srtmgl1v003/), 空间分辨率为 90 m, 秦岭
表1 本研究使用的8个地球-气候系统模式基本信息
陕西段地形图[审图号:陕 S(2014)026 号]如图 1
Table 1 Basic information on the 8 Earth-Climate
所示。
System Models in this study
2. 1. 2 模式数据
序号 模式 所属国家 研发机构
本文使用的模式数据来源于美国国家航空航
A CNRM-ESM2-1 法国 CNRM-CERFACS
天局(NASA)基于第六次国际耦合模式比较计划
B GFDL-ESM4 美国 NOAA-GFDL
(CMIP6)输出的逐日资料进行统计降尺度和偏差校
C IITM-ESM 印度 CCCR-IITM
正处理后的模拟数据(NASA Global Daily Down‐
D INM-CM4-8 俄罗斯 INM
scaled Projections, CMIP6, NEX-GDDP-CMIP6;
E INM-CM5-0 俄罗斯 INM
https: //ds. nccs. nasa. gov/thredds/catalog/AMES/
NEX/GDDP-CMIP6/catalog. htm)(以下简称 NEX- F IPSL-CM6A-LR 法国 IPSL
G MIROC-ES2L 日本 MIROC
GDDP-CMIP6)。该数据集使用月度偏差校正和空
间分解(BCSD)方法生成的水平分辨率为 0. 25°× H NESM3 中国 NUIST
表2 NEX-GDDP-CMIP6情景比较计划-核心试验情景的基本信息
Table 2 Basic information about core experiments in ScenarioMIP in NEX-GDDP-CMIP6
-2
情景 辐射强迫类型 2100年辐射强迫/(W·m ) 共享社会经济路径 情景描述
SSP1-2. 6 低 2. 6 SSP 1(可持续发展) 低脆弱性、 低减缓压力和低辐射强迫的综合影响
SSP2-4. 5 中 4. 5 SSP 2(中等发展) 中等社会脆弱性与中等辐射强迫的组合
SSP3-7. 0 高 7. 0 SSP 3(局部发展) 高社会脆弱性与相对高的人为辐射强迫的组合
SSP5-8. 5 高 8. 5 SSP 5(常规发展) 高排放、 高强迫组合的发展路径
2. 2 研究方法 n
∑ ( X i - X ) × (Y i - Y )
ˉ
ˉ
2. 2. 1 空间相关系数 R = i = 1 (1)
采用空间相关系数, 检验模式对气温变化趋势 n 2 n 2
∑ ( X i - X ) × ∑ (Y i - Y )
ˉ
ˉ
和气候态空间分布的模拟能力, 计算公式(魏凤 i = 1 i = 1
英, 2007)如下: 式中: n 为格点数; X i 和 Y i 为第 i个格点的观测值和