
Page 267 - 《高原气象》2022年第5期
P. 267
高 原 气 象 41 卷
1360
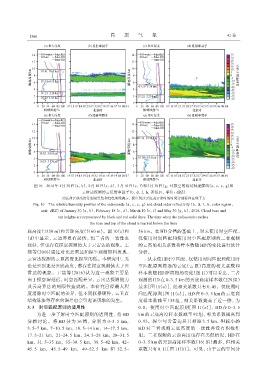
图10 2018年1月30日(a,b),2月18日(c,d),3月10日(e,f)和5月30日(g,h)探空的相对湿度廓线(a,c,e,g)和
云雷达探测的云反射率因子(b,d,f,h,彩色区,单位:dBZ)
云底和云顶高度分别用黑色和红色实线表示,探空到达云底或云顶时的时间分别标注在线下方
Fig. 10 The relative humidity profiles of the radiosonde(a,c,e,g)and cloud radar reflectivity(b,d,f,h,color region,
unit:dBZ)of Jaunary 30(a,b),February 18(c,d),March 10(e,f)and May 30(g,h),2018. Cloud base and
top heights are represented by black and red solid lines. The time when the radiosonde reaches
the base and top of the cloud is marked below the lines
底高度(1350 m)和云顶高度(5160 m)。图 10(c)和 56 km。在 HD 分档的基础上,对未使用时空匹配、
(d)中显示,云边界虽有起伏,但二者的一致性也 仅使用时间匹配和使用时空匹配原则的二者观测
较好,但也存在探空探测值大于云雷达的现象。王 的云高的相关系数和样本数随 HD 的变化进行统计
喆等(2016)通过对比云雷达和探空观测资料发现, 分析。
云雷达探测的云顶高度比探空的低。本研究中,无 从未使用时空匹配、仅使用时间匹配和使用时
论是云顶还是云底高度,都存在探空观测值大于云 空匹配原则筛选的云底(云顶)高度的相关系数和
雷达的现象。王喆等(2016)认为这一现象主要是 样本数随 HD 距离档的变化(图 11)可以看出,二者
由于探空湿延迟,时空匹配差异,云雷达探测能力 观测的 HD 在 0~3. 5 km 的云底高度样本数(229 组)
及云高算法的局限性造成的。本研究已经最大程 最多[图 11(a)],但相关系数只有 0. 45。仅使用时
度消除时空匹配的差异,但不同仪器硬件,云垂直 间匹配原则[图 11(c)],HD 在 0~3. 5 km 的云底高
结构算法等存在的误差也会引起该现象的发生。 度样本数减至 155 组,相关系数提高了近一倍,为
3. 3 时空匹配原则的适用性 0. 8。使用时空匹配原则[图 11(e)],HD 在 0~3. 5
为进一步了解时空匹配原则的适用性,将 HD km 的云底高度样本数减至 92 组,相关系数提高到
分档讨论。将 HD 分为 16 档,分别为 0~3. 5 km, 0. 93。探空与云雷达虽只相距 3. 5 km,但较小的
3. 5~7 km,7~10. 5 km,10. 5~14 km,14~17. 5 km, HD 对二者观测云底高度的一致性并没有积极作
17. 5~21 km,21~24. 5 km,24. 5~28 km,28~31. 5 用。二者观测的云顶高度也存在类似情况,HD 在
km,31. 5~35 km,35~38. 5 km,38. 5~42 km,42~ 0~3. 5 km 的云顶高度样本数(161 组)最多,但相关
45. 5 km, 45. 5~49 km, 49~52. 5 km 和 52. 5~ 系数只有 0. 11[图 11(b)]。可见,由于云的空间分