
Page 262 - 《高原气象》2022年第5期
P. 262
5 期 王 瑾等:探空和毫米波云雷达探测云高一致性的时空匹配原则研究 1355
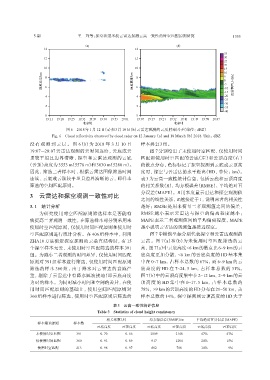
图6 2018年1月12日(a)和3月10日(b)云雷达观测的云反射率因子(单位:dBZ)
Fig. 6 Cloud reflectivity observed by cloud radar on 12 January(a)and 10 March(b)2018. Unit:dBZ
没 有 观 测 到 云 层 。 图 6(b)为 2018 年 3 月 10 日 样本共213组。
19:07-20:07 云雷达观测的云时间连续,云底或云 图 7 分别给出了未使用时空匹配、仅使用时间
顶较平坦且边界清晰,探空和云雷达观测的云底 匹配和使用时空匹配的云底(左)和云顶高度(右)
(云顶)高度为 3553 m(5578 m)和 3030 m(5280 m)。 的散点分布,色标标记了探空探测到云底或云顶高
因此,筛选二者样本时,根据云雷达图像筛选时间 度时,探空与云雷达的水平距离(HD,单位:km)。
连续、云底或云顶较平坦且边界清晰的云,即样本 表 3 为云高一致性统计信息,包括云底和云顶高度
筛选的空间匹配原则。 的相关系数(R),均方根误差(RMSE),平均绝对百
分误差(MAPE)。R 用来度量云雷达和探空观测值
3 云雷达和探空观测一致性对比
之间的线性关系,R越接近于 1,说明两者的相关性
3. 1 统计分析 越好;RMSE 是用来衡量二者观测值之间的偏差,
为研究使用时空匹配原则筛选样本是否能有 RMSE 越小表示云雷达与探空的偏离程度越小;
效提高二者观测一致性,在筛选样本时分别采用未 MAPE 表示二者观测值间的平均偏离程度,MAPE
使用时空匹配原则,仅使用时间匹配原则和使用时 越小说明云雷达的观测值越接近探空。
空匹配原则进行统计分析。在 406 组样本中,利用 图 7中横纵坐标分别代表探空和云雷达观测的
ZHA10 方法确定探空探测的云垂直结构时,有 15 云高。图 7(a)和(b)为未使用时空匹配筛选的云
个探空样本无云,未使用时空匹配筛选的样本 391 高,图 7(a)中云底高度<6 km的散点比 6~9 km的云
组。为减小二者观测的时间差异,仅使用时间匹配 底高度更加分散,<6 km 的云底高度的 HD 基本集
原则对 391 组样本进行筛选,仅使用时间匹配原则 中在 0~7 km,占样本总数的 67%,而 6~9 km 的云
筛选的样本 360 组,由于降水对云雷达的衰减严 底高度的 HD 在 7~24. 5 km,占样本总数的 31%。
重,剔除了云雷达中有降水回波接地(即云底高度 图 7(b)中的云顶高度集中在 2~12 km,2~9 km 的云
为 0)的样本。为同时减小时间和空间的差异,在使 顶高度的 HD 集中在 0~17. 5 km,占样本总数的
用时间匹配原则的基础上,使用空间匹配原则对 78%,>9 km的云顶高度的HD分布在21~50 km,占
360 组样本进行筛选,使用时空匹配原则后筛选的 样本总数的 14%,探空探测到云顶高度的 HD 大于
表3 云高一致性统计信息
Table 3 Statistics of cloud height consistency
相关系数(R) 均方根误差(RMSE)/m 平均绝对百分误差(MAPE)
样本筛选原则 样本数
云底高度 云顶高度 云底高度 云顶高度 云底高度 云顶高度
未使用时空匹配 391 0. 70 0. 66 2009 2148 47% 47%
仅使用时间匹配 360 0. 93 0. 89 917 1204 24% 15%
使用时空匹配 213 0. 98 0. 97 602 708 14% 9%