
Page 257 - 《高原气象》2022年第5期
P. 257
高 原 气 象 41 卷
1350
价值的参考。 表1 毫米波云雷达的主要性能指标
Table 1 Millimeter-wave cloud radar parameters
2 资料来源与方法介绍
指标项 详细说明
2. 1 资料来源 雷达体制 全固态、全相参多普勒、脉冲压缩
本研究使用的观测资料是西安泾河站的毫米 工作频率 Ka波段,波长8. 6 mm,35 GHz
波云雷达(云雷达),L 波段无线电探空(探空)和 C 扫描方式 垂直顶空固定指向(THI)
波段新一代多普勒天气雷达(多普勒雷达)。云雷 探测模式 组合脉冲探测模式
达是由中国气象局气象探测中心,成都信息工程大 脉冲宽度 1 μs,5 μs,20 μs
学 和 西 安 华 腾 微 波 有 限 责 任 公 司 联 合 研 制 的 天线增益 ≥53 dB
HT101型全固态云雷达,波长为 8. 6 mm,中心频率 波束宽度 ≤0. 4°
为 35 GHz,顶空垂直固定扫描方式进行连续观测。 脉冲重复频率 5714 Hz
云雷达的主要性能指标见表 1。探空施放位置与云 距离库数 527
雷达的距离约 60 m,每日 07:15(北京时,下同)和 距离库长 30 m
19:15各施放一次。 探测要素 回波强度(Z)、径向速度(V)、速度谱宽(W)
本研究收集了 2017 年 8 月 17 日至 2018 年 12 月 探测高度范围 Z:≥10 km;V:≥10 km;W:≥10 km
31 日共 508 天的云雷达、探空和多普勒雷达的观测 参数测量范围 Z:-40~+40 dBZ;V:±15 m·s ;W:0~15 m·s -1
-1
数据,其中 71天无数据,有 70天无云,因此云雷达 探测精度 Z:≤1 dB;V:≤1 m·s ;W:≤1 m·s -1
-1
的有云天数为 367 天。逐日挑选云雷达和探空
07:00-08:00 和 19:00-20:00 两个时段有云的样本, 表明,偏振量的测量是区分云回波和其他回波的有
共有406组可对比样本。 效手段(Gourley et al,2007;Hurtado and Nehorai,
2. 2 云雷达识别云边界算法 2008;Unal,2009;Chandrasekar et al,2013)。 然
毫米波段的云雷达对低层大气中大量存在的 而,本研究中的云雷达没有偏振测量装置。因
地物回波、晴空回波(Gossard,1990;Russell and 此,参考 Kalapureddy et al(2018)提出的雷达反射
Wilson,1997)、气溶胶、云滴和生物群(包括昆虫 率因子廓线识别云的方法对云边界进行判断。本
和其他生物微粒)等较敏感。来自边界层的回波与 研究中云回波的判断标准为:(1)云回波的最大
云层回波的反射率相近,因此掩盖了真实的云层回 厚度大于 120 m;(2)除较弱的云区外,云回波的
波(Luke et al,2008)。因此,云回波的识别对于提 标准差(SD)小于 1σ;(3)云回波的速度谱宽大于
2
-2
高云雷达识别云边界的数据质量至关重要。研究 0. 5 m·s ;(4)云回波的去相关周期为40~170 s。
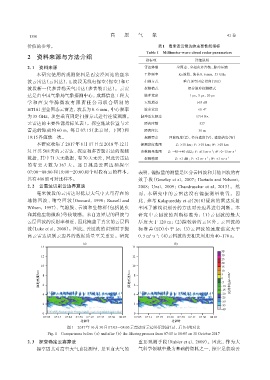
图1 2017年10月30日07:05-08:05云雷达对云边界识别前(a)、后(b)的对比
Fig. 1 Comparisons before(a)and after(b)the filtering process from 07:05 to 08:05 on 30 October 2017
2. 3 探空确定云高算法 重要观测手段(Rabier et al,2009)。因此,作为大
探空因其对高空大气直接测量,是垂直大气的 气科学领域中最为基础的资料之一,探空是获取云